Wird ein Speicher über einen Block mit proportionalem Verhalten gefüllt, dann bezeichnen wir das in der Regelungstechnik als PT-Verhalten. Es gibt PT-Verhalten unterschiedlicher Ordnung. Je mehr Speicher im System umgeladen werden, desto höher ist die Ordnung. Ein PT-1 System verfügt über einen Speicher, ein PT-2 System über 2 Speicher usw. Energiespeicher machen ein System träge, deshalb reagiert ein System mit vielen Speichern und damit einer hohen Ordnung i. A. langsam.
Ein Beispiel für PT-1-Verhalten ist im Bereich Elektrotechnik der Kondensator (Speicher), der über einen Widerstand (P-Verhalten) aufgeladen wird. Dies wird im Kapitel Aufladen eines Speichers beschrieben, das Sie jetzt erst einmal in Ruhe lesen sollten.
Charakteristisch für PT-1 Verhalten ist der Verlauf der Sprungantwort. Sie ändert sich direkt nach dem Sprung exponentiell und flacht anschließend auf einen konstanten Verlauf hin ab.
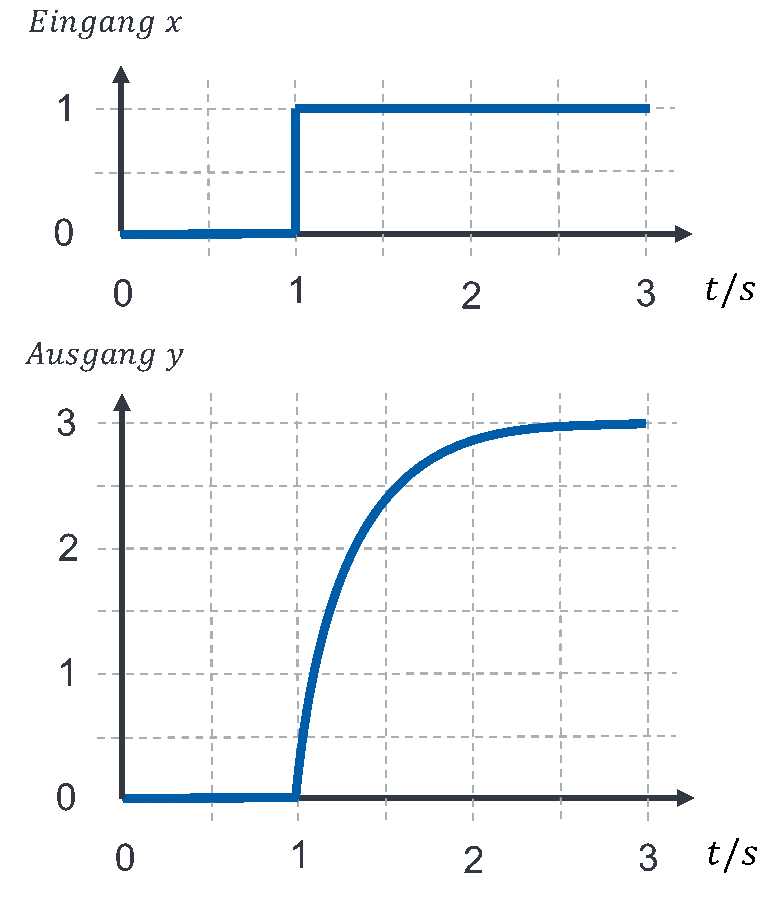
Der Endwert im eingeschwungenen Zustand bei s = 0 ist nicht immer gleich dem Eingangswert. Ein System mit PT-1-Verhalten kann auch dämpfen oder verstärken. Analog zum P-Verhalten wird der Verstärkungswert mit KP bezeichnet. KP entspricht dem Quotienten aus Wert im eingeschwungenen Zustand des Ausgangs y(t→∞) bzw. y(s = 0) geteilt durch den Endwert des Sprungs im Eingang x(t→∞) bzw. x(s = 0).
Im Beispiel in der oberen Abbildung gilt also KP = 3.
Das Zeitverhalten im Übergang wird durch den Parameter τ (Tau) definiert. Er gibt an, wie lange es dauert, bis der eingeschwungene Zustand erreicht ist. Tau ist eine Zeit mit der Einheit Sekunde (s). Es dauert bei einem System mit PT-1-Verhalten τ Sekunden, bis die Ausgangsgröße y(t) 63% des Endwerts erreicht hat. Nach der Zeit 5 ∙ τ hat y(t) 99% seines Endwerts erreicht. Es gilt also
y(τ) = 0,63 ∙ x(t→∞)
y(5 ∙ τ) = 0,99 ∙ x(t→∞)
Nach der Zeit 5 ∙ τ gilt das System typischerweise als eingeschwungen, denn eine Abweichung von nur 1% ist für viele Anwendungen ausreichend gering.
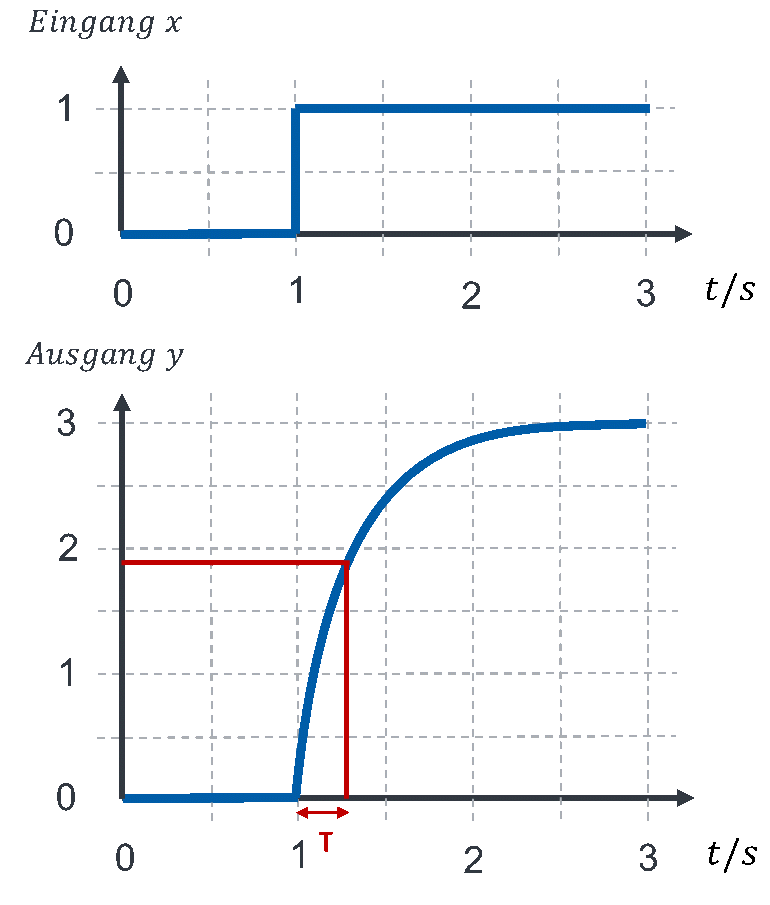
Wir ermitteln τ aus einer Sprungantwort, indem wir die Sprunghöhe des Ausgangs y(t) – hier den Wert 3 – mit 0,63 multiplizieren. Das Ergebnis lautet 3 ∙ 0,63 = 1,89. Τau ist die Zeit, die seit dem Sprung des Eingangs vergangen ist, bis der Ausgang den Wert 1,89 erreicht. Dies ist in der Abbildung oben etwa 0,3 s nach dem Sprung des Eingangs der Fall. Es gilt also τ = 0,3 s. Ein typischer Fehler wäre hier, die Zeit 1,3 s für tau anzugeben, es wird aber immer die Zeit ab dem Sprungzeitpunkt gemessen.
Mit den Parametern KP und τ ist ein PT-1-System vollständig mathematisch beschrieben. Es wird mit diesen Parametern modelliert. Für PT-1-Systeme müssen Sie also diese beiden Parameter bestimmen. Das erfolgt entweder über die Sprungantwort aus dem Zeitverlauf heraus oder über die Formel. Die Übertragungsfunktion eines PT-1-Systems lautet im Frequenzbereich
Im eingeschwungenen Zustand gilt
Simulieren wir ein PT-1 System in Matlab® Simulink®. Beachten Sie, dass in Simulink Größen niemals Einheiten haben, selbst die Zeit nicht. Alle Einheiten müssen wir den Größen gedanklich hinzufügen. Betrachten wir zunächst das Modell eines Blocks mit PT-1-Verhalten:
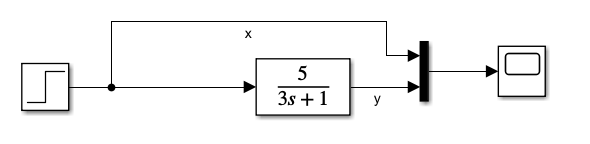
Ganz links sehen Sie ein STEP-Element, das auf einen Sprung von 0 auf 2 zum Zeitpunkt 1 konfiguriert ist. Sie finden es in Simulink im „Library Browser“ unter „Sources“. Mit einem Doppel-Click auf das Element können Sie Sprunghöhe und Sprungzeitpunkt festlegen.
In der Mitte sehen Sie das PT-1-Element als TRANSFER FCN. Die Verstärkung des Blocks KP = 5 steht im Zähler des Bruchs. Als Endwert des Ausgangs im eingeschwungenen Zustand erwarten wir also den Wert 10, wenn der Eingang auf den Wert 2 springt.
Im Nenner steht der Term 3s + 1. Ich schreibe den immer anders herum, diesen Term würde ich in diesem Tutorial als 1 + 3s schreiben. Der Faktor vor dem s ist der Wert von tau. Also gilt hier τ = 3.
Danach folgen rechts ein Signal-MULTIPLEXER und ein SCOPE. Mit einem Multiplexer können mehrere Signale gleichzeitig auf dem SCOPE dargestellt werden. Die Signale an Eingang und Ausgang des Blocks sind mit x und y benannt.
Wir stimulieren das Verhalten des Blocks mit einem Sprung am Eingang von 0 auf 2. Wir setzen KP = 5 und τ = 3. Wir erwarten, dass der Ausgang im eingeschwungenen Zustand den Wert y (t→∞) = 2 ∙ 5 = 10 annimmt. Nach der Zeit t = τ = 3 soll der Ausgang den Wert y (t = τ = 3) = 0,63 ∙ 10 = 6,3 erreichen. Das Ergebnis der Simulation sieht folgendermaßen aus:
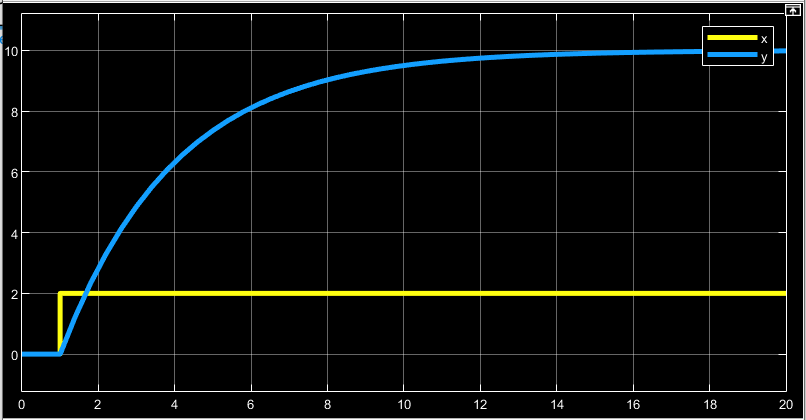
Bei der Zeit t = 4 erreicht y 63% des Endwerts. Da der Sprung zur Zeit t = 1 stattgefunden hat, beträgt τ = 3.
Beispiel
Wir betrachten ein System mit I-Verhalten mit KIS=0,01. Wir verwenden einen Regler mit P-Verhalten mit KPR=50. Ich verzichte in diesem Beispiel auf Einheiten, damit wir leichter rechnen können. Das Modell des geregelten Systems sieht in Simulink folgendermaßen aus:
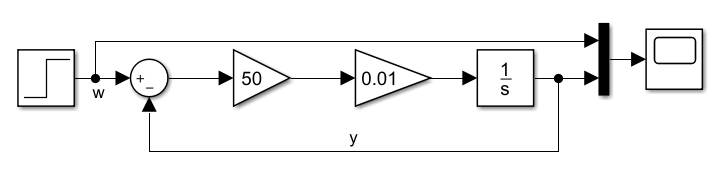
Wir regen das geregelte System zur Charakterisierung an seinem Eingang mit einem Sprung von 0 auf 1 an und simulieren die Sprungantwort. Das geht für einzelne Funktionsblöcke genauso wie für geregelte Systeme. Als Ergebnis erhalten wir folgenden Plot für Eingang w und Ausgang y:
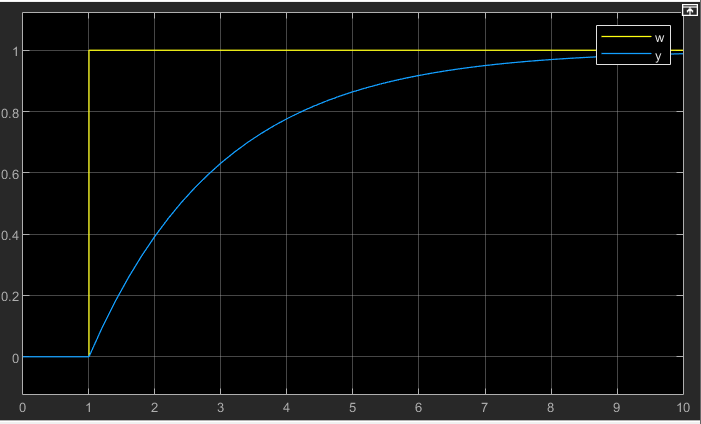
Aus dem Plot können wir erkennen, dass das System PT-1-Verhalten zeigt. Die charakteristischen Parameter bestimmen wir wie folgt:
τ = Zeit zum Erreichen von 63% im Ausgang Minus Zeit des Sprungs des Eingangs = 3 – 1 = 2
Die mathematische Lösung dazu lautet:
Für das Führungsverhalten gilt
Der Wert im Zähler entspricht KP, es gilt KP = 1. Der Vorfaktor vor dem s entspricht Tau. Es gilt τ = 2. Das System erreicht nach 5 Tau seinen Endwert zu 99%. Das ist hier 10 Sekunden nach dem Sprung, also zur Zeit 11 der Fall.
Wir machen immer einen Koeffizientenvergleich der Übertragungsfunktion des speziellen Systems (hier: Regelkreis) mit der Übertragungsfunktion des allgemeinen PT-1 Verhaltens. Stellen wir beide gegenüber, können wir die Parameter ablesen.
Allgemeines Verhalten von PT-1:
Spezielles Verhalten des Führungsverhaltens des Regelkreises:
Erweiterung der Ziele
Der Ausgang von Systemen mit PT-1-Verhalten erreicht seinen Endwert verzögert. Während der Übergangszeit weist ein geregeltes System mit PT-1-Verhalten eine hohe Regelabweichung auf. Deshalb ist es in der Regelungstechnik wichtig, dass die Übergangszeit möglichst klein ist. Die Ziele der Regelungstechnik werden also folgendermaßen erweitert:
1. Es sollte gelten: HFü = 1
2. Es sollte gelten: HSu = 0
3. Das System sollte nach möglichst geringer Zeit eingeschwungen sein, also seinen Endwert erreicht haben.