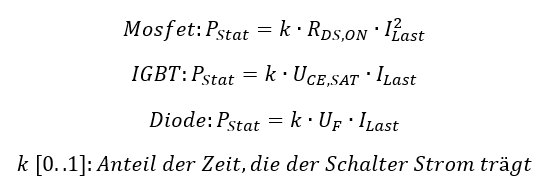
An Schaltern treten statische und dynamische Verluste auf. Die statischen Verluste hängen vom Bauelement ab. Bei IGBTs und Dioden liegt eine Spannung am Schalter an, auch wenn dieser geschlossen ist. Für die Bestimmung der statischen Verluste wird diese Spannung mit dem Laststrom und dem Duty-Cycle multipliziert. Der Duty-Cycle bestimmt, wie lange der Schalter den Strom bezogen auf die PWM-Periodendauer leitet.
Mosfets weisen einen ON-Widerstand auf. Die statischen Verluste errechnen sich aus dem ON-Widerstand, dem Laststrom und dem Duty-Cycle. Es gilt:
Jedes Umschalten der Mittelpunktspannung verursacht in den Schaltern dynamische Verluste. Je häufiger geschaltet wird, desto öfter treten die Verluste auf. Die Verluste eines Schaltvorgangs werden deshalb mit der Schaltfrequenz multipliziert. Weil Schalter während einer Periodendauer der PWM jeweils einmal ein- und ausgeschaltet werden, können wir für die mittlere Verlustleistung Einschalt- und Ausschaltverluste addieren. Diese Werte entnehmen wir dem Datenblatt. Sie hängen von der Schaltspannung, dem Schaltstrom und der Dauer der Strom- und Spannungsänderung ab. Es gilt:
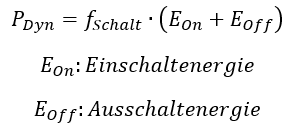
Wir verwenden Energien statt Leistungen für die Berechnung der Schaltvorgänge. Die Frequenz hat die Einheit 1/s. Die Energie ist als Produkt aus Leistung und Zeit definiert. Das Produkt aus Frequenz und Energie ist damit eine Leistung.
Optimierung der Verluste
Die dynamischen Verluste steigen, wenn häufig geschaltet wird. Das ist bei einer hohen Schaltfrequenz der Fall. Die hohe Schaltfrequenz brauchen wir aber, um eine geringe Stromwelligkeit bei kleinen Spulen und Kondensatoren zu erreichen.
Hier liegen klassische Optimierungsprobleme vor. Wenn wir die Schaltfrequenz verändern, verschlechtern wir einen Parameter und verbessern den anderen. Hier gibt es nicht die eine richtige Lösung, sie muss für jedes System neu gefunden werden.
Beispiel
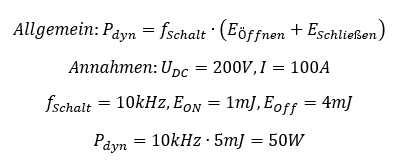
Wird der Schalter mit einer Schaltfrequenz von 10kHz betrieben, schließt er pro Sekunde 10000 Mal. Er öffnet pro Sekunde ebenfalls 10000 Mal. Er wird also 20000 Mal geschaltet. Damit können wir die dynamische Verlustleistung berechnen. Wir brauchen dazu nur noch die Energie zum Ein- und Ausschalten. Wir berechnen die Verluste eines Schalters der Halbbrücke:
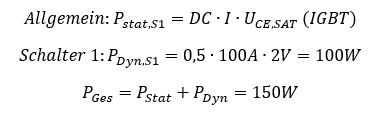
Die statische Verlustleistung am Schalter hängt davon ab, wie lange Strom durch den Schalter fließt. Zustand 1 und Zustand 2 sind in unserem Beispiel jeweils 50% der Zeit aktiv. Das ist nicht immer der Fall, wir setzen das zur Vereinfachung aber für die Berechnung an. Der Laststrom von 100A fließt 50% der Zeit durch den Schalter S2. Wir sprechen von einem „Duty Cycle“ von DC = 0,5. Damit ist gemeint, wie hoch der Anteil der Zeit ist, in der Strom durch einen der Schalter fließt. Die Sättigungsspannung beträgt in diesem Beispiel 2V. Es handelt sich also um einen IGBT als Schalter.
Wirkungsgrad
Die Verluste eines Schalters betragen 150W. Beide Schalter in der Brücke weisen Verluste von 300W in Summe auf. Es wird eine Leistung von P = 100A ∙ 200V = 20kW geschaltet. Wir gehen davon aus, dass die Spule verlustfrei ist. Es gilt:
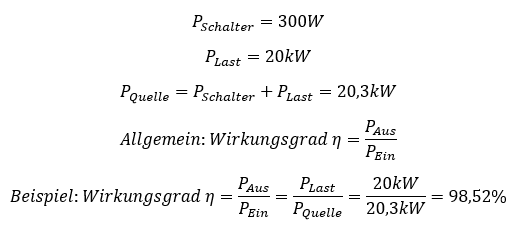
Wofür soll das gut sein? Mit dieser Schaltung haben wir den besten möglichen Wirkungsgrad verglichen mit allen anderen Lösungen erreicht.
Die Parameter der Schalter sind für den Wirkungsgrad der Schaltung verantwortlich. Ein Schalter mit höherer Sättigungsspannung im Zustand offen UCE,SAT führt zu höheren statischen Verlusten. Ist die Schaltzeit länger, steigen die dynamischen Verluste. Diese beiden Parameter sind entscheidend für den Wirkungsgrad der Schaltung.
Die Parameter Strom, Spannung und Schaltfrequenz beeinflussen den Wirkungsgrad ebenfalls. Spannung und Strom gibt die Last vor, die haben Sie nicht in der Hand. Die dynamischen Verluste steigen mit der Schaltfrequenz an. Die Schaltfrequenz bewirkt in der Schaltung noch viel mehr, deshalb wird sie im Gesamtsystem – unter Berücksichtigung der dynamischen Verluste der Schalter – optimiert.
Externe Links: Gute Quelle dazu
Aufgabe
Es sollen die Verluste an den Schaltern des folgenden Tiefsetzstellers berechnet werden. Den Tiefsetzsteller bauen wir aus einem IGBT-Modul, einer Eingangsquelle und einer Spule auf. Wir verwenden zwei der 6 Schalter des IGBT-Moduls. Das Datenblatt des IGBT-Moduls finden Sie hier. Wir binden das IGBT-Modul folgendermaßen in die Tiefsetzsteller-Schaltung ein:
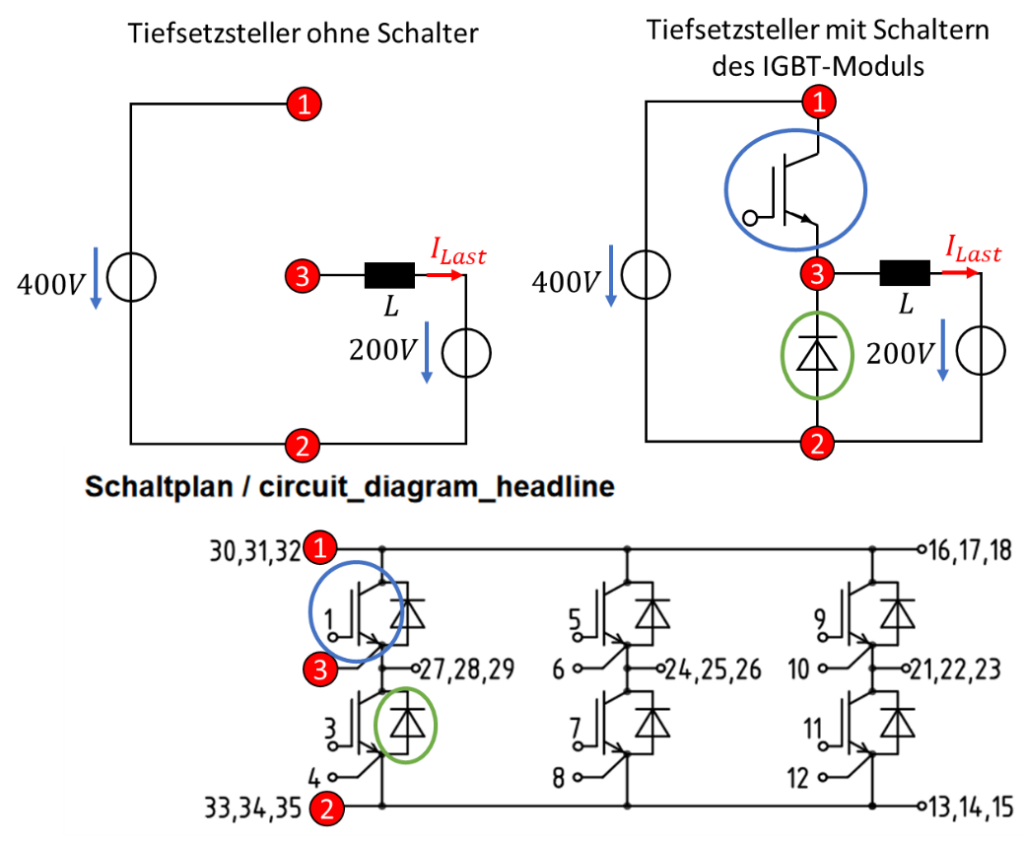
Quelle: Datenblatt des IGBT-Moduls FS100R06KE3 von Infineon, Seite 7 oben.
Das IGBT-Modul (unterer Teil der Abbildung) wird an drei Stellen (rot) mit dem Tiefsetzsteller verbunden, so dass die linken beiden der 6 Schalter genutzt werden. Die rechten 4 Schalter bleiben ungenutzt. Wir brauchen also statische und dynamische Verluste für eine Diode und einen IGBT.
Parameter:
Nutzen Sie für die Aufgabe folgende Werte:
50% Duty-Cycle
Eingangsspannung 400V
Laststrom 100A
fSchalt = 10kHz.
Das Gate des IGBTs wird mit einer Steuerspannung von UGE = 15V angesteuert um diesen zu schließen.
Umgebungstemperatur Tvj = 25°C.
Rechnen Sie immer mit typischen Werten.
Aufgaben
1. Ermitteln Sie die Schaltenergie für Ein- und Ausschalten EON und EOFF für Diode und IGBT aus dem Datenblatt. Beachten Sie, dass die Diode beim Einschalten nahezu keine Verlustleistung aufweist, deshalb ist diese im Datenblatt nicht aufgeführt.
2. Berechnen Sie die dynamischen Verluste von IGBT und Diode.
3. Ermitteln Sie die Sättigungsspannung des IGBTs und die Flussspannung der Diode.
4. Berechnen Sie die statische Verlustleistung von IGBT und Diode.
Hinweise
Im Datenblatt steht vieles, was Sie für diese Aufgabe ignorieren können.
Die erste Seite beschreibt den IGBT. Die zweite Seite beschreibt die Diode.
Sie können alle Werte aus den Tabellen entnehmen. Die Diagramme benötigen Sie nicht.
Weiter