Als nächstes betrachten wir PT-1-Verhalten in einem Regelkreis. Wenn Parameter A PT-1-Verhalten aufweist, erhalten wir folgendes Blockschaltbild:
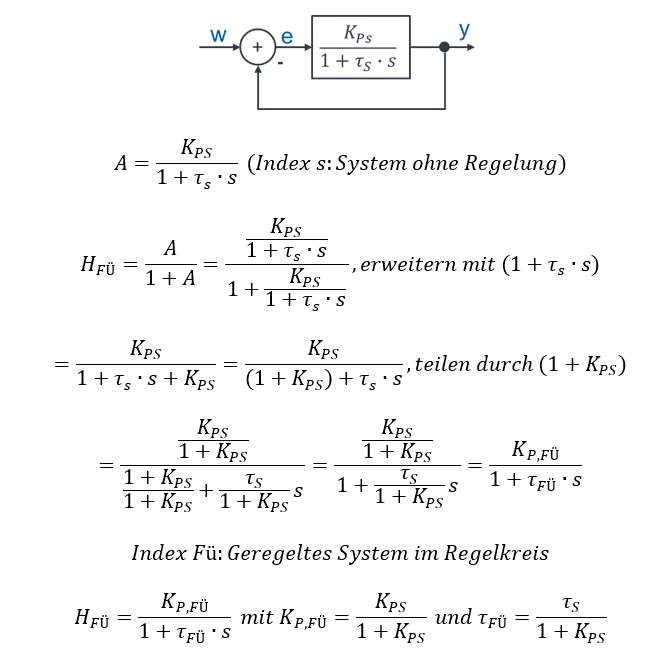
Das Führungsverhalten zeigt ebenfalls PT-1-Verhalten. Die charakteristischen Parameter unterscheiden sich aber von denen des PT-1 Verhaltens von Block A. Vor allem verändert sich τFü. Es wird kleiner, je größer KP ist. Wir können also über kP das geregelte System gegenüber A beschleunigen.
Im eingeschwungenen Zustand gilt:
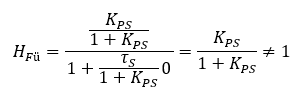
Wir haben das gleiche Problem wie bei P-Verhalten im Regelkreis: Das Führungsverhalten ist für reale Werte von kP immer kleiner als 1. Es gibt also eine Regelabweichung selbst im eingeschwungenen Zustand. Das liegt daran, dass PT-1-Verhalten sich wie ein zeitlich verzögertes P-Verhalten verhält. Im eingeschwungenen Zustand nimmt A endliche Werte an, wenn wir für A PT-1-Verhalten einsetzen. Damit muss eine Regelabweichung e im System verbleiben.
PT-1-Verhalten im Regelkreis ist noch schlechter als P-Verhalten im Regelkreis. Es gibt eine bleibende Regelabweichung im eingeschwungenen Zustand. Zusätzlich kommt es nach einem Sprung zu großer Regelabweichung im Übergangsbereich. P-Verhalten reagiert am Ausgang wenigstens unmittelbar auf den Sprung.
Weiter