Als Beispiel für ein gesteuertes System betrachten wir eine mechanische Uhr. Die Uhr hat ein Problem: Sie kennt die aktuelle Uhrzeit nicht. Also kann sie während des Betriebs keinen Abgleich zwischen Soll- und Istwert durchführen. Gelegentlich schaut der Träger auf eine „Referenzuhr“. Die dort angezeigte Zeit nutzt er als Sollwert, um die auf seiner Uhr angezeigte Zeit (Istwert) abzugleichen. Das ist ein kurzer Augenblick der Regelung.
Die Drehung der Uhrzeiger einer mechanischen Uhr in der richtigen Geschwindigkeit unterliegt Störungen. Sie ist z. B. von der Temperatur abhängig und sie ändert sich bei Alterung der Komponenten. Eine Feder verliert z. B. über die Jahre an Steifigkeit. Hier haben unsere Vorfahren viel Wissen über Mechanik investiert, um diese Abhängigkeit zu reduzieren. Es wurde z. B. Material eingesetzt, bei denen die Störungen geringer auf die Regelgröße wirken. Die Intensität der Wirkung der Störungen auf die Regelgröße wurde soweit reduziert, dass das System gesteuert betrieben werde kann.
Elektrische Uhren ohne Internetanschluss und ohne Funkmodul lösen dieses Problem ebenfalls gesteuert. Sie verwenden hochgenaue Quartze, mit denen ein präziser Takt für die Uhr vorgegeben werden kann. Der Einfluss von Störungen auf die Regelgröße wurde noch weiter reduziert.
Erst mit Funkuhren oder mit Smartphones wurde es möglich, der Uhr permanent die richtige Zeit zur Verfügung zu stellen. Jetzt braucht es keine akkurate (gesteuerte) Mechanik mehr, um über lange Zeit hinweg mit möglichst wenig äußeren Eingriffen die richtige Zeit anzuzeigen. Jetzt ist eine Regelung möglich, die unabhängig von allen Störungen immer die richtige Zeit anzeigt.
Die Verfügbarkeit der richtigen Zeit als Messwert hat erst eine Regelung des Systems ermöglicht. Sobald diese Größe verfügbar wurde, wurde sofort auf eine Regelung umgestellt. Keine moderne Uhr läuft mehr gesteuert. Das ist typisch für die Digitalisierung: Es wird immer mehr geregelt, deshalb ist es immer wichtiger, die Regelungstechnik zu verstehen.
Betrachten wir noch ein anderes Beispiel: Die Füllhöhe h eines Tanks soll einem Sollwert entsprechen. Wir nehmen für das Beispiel an, dass die Führungsgröße (Sollwert) hsoll = 1m entspricht. Die Störgröße beim Tank ist der Ablauf, über den Wasser abgezapft wird. Die Menge an Wasser, die aus dem Tank über den Ablauf herausfließt, wird bei der Steuerung gemessen. Um den Füllstand auf dem Sollwert zu halten, wird einfach die gleiche Menge Wasser über den Zulauf (Aktor) wieder zugeführt.
Wenn die Führungsgröße von hsoll = 1m auf z. B. hsoll = 1,1m erhöht wird, muss das System wissen, wie es darauf reagieren muss. Dafür muss bei der Steuerung ein vollständiges Berechnungsmodell mit allen dafür notwendigen Formeln hinterlegt werden. Ist die Grundfläche A des Tanks bekannt (z. B. A = 1m2), dann kann die notwendige Volumenänderung des Wassers berechnet werden. Es gilt:

Es muss ein Wasservolumen von dV = 1m2 ∙ 0,1m = 0,1m3 hinzugefügt werden. Der Zulaufhahn wird also so lange offengelassen, bis diese Menge in den Tank geflossen ist. Die Dauer kann über die Fläche des Zulaufs bestimmt werden.
Die notwendigen Berechnungen in einem gesteuerten System können sehr kompliziert werden. Sie werden im Block „Steuerung“ durchgeführt, der aus den gemessenen Störgrößen die richtige Ansteuerung des Aktors berechnet. In diesem Beispiel war das Ausgleichen der Störgröße relativ einfach, das Nachführen der Ausgangsgröße bei Änderung des Sollwerts relativ kompliziert. Folgendes Blockschaltbild modelliert die Aufgabe:
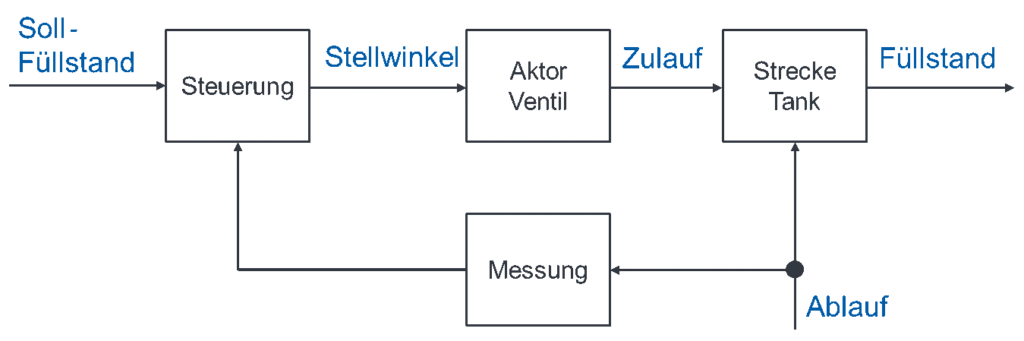
Der Sollwert „Soll-Füllstand“ gibt den Wunsch des Nutzers für die Ausgangsgröße vor. Er ist eine Eingangsgröße für den Block „Steuerung“. Dieser berechnet aus dem Sollwert und der gemessenen Störgröße „Ablauf“ den richtigen Stellwinkel für den Aktor „Ventil“. Das Ventil gibt den Zulauf an Wasser für den Tank vor. Der Füllstand des Tanks wird von Zulauf und Ablauf vorgegeben.
Beim Tempomaten ist die Steuerung noch viel komplizierter. Zur Erinnerung: Es werden bei der Steuerung alle Störgrößen gemessen und damit wird die Eingangsgröße so verändert, dass die Ausgangsgröße weiterhin gleich dem Sollwert bleibt.
Für dieses Beispiel nehmen wir an, dass ein Auto 80 km/h schnell fahren soll. Es fährt auch auf gerader Strecke genau 80km/h. Die Störgrößen bei der Vorgabe der Geschwindigkeit im Auto sind vor allem Steigung und Gegenwind. Konzentrieren wir uns auf die Steigung. Jetzt fährt das Auto einen Berg hoch. Sie messen als Störgröße (wie auch immer) die Steigung des Bergs. Die Steuerung muss jetzt wissen, wie das Gaspedal als Eingangsgröße verstellt werden muss, damit die Ausgangsgröße Geschwindigkeit immer noch 80 km/h beträgt.
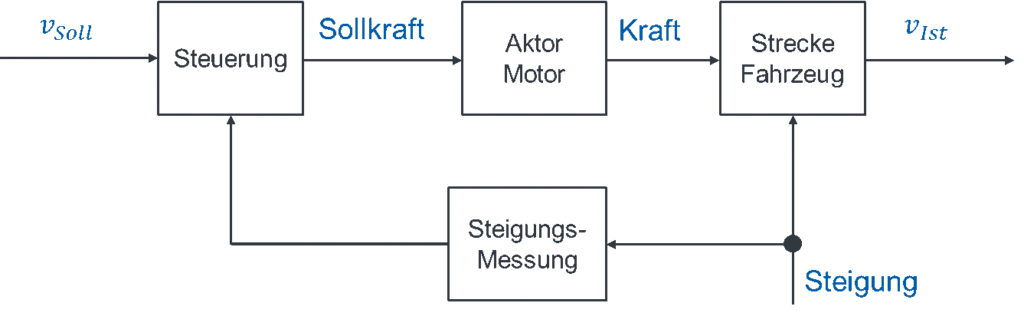
Dafür müsste die Steuerung die Bremswirkung durch die Steigung, den Motor, das Getriebe, die Kraftübertragung an den Reifen etc. als Formeln kennen. Das ist in der Praxis unmöglich. Es ist auch nicht notwendig, denn in solchen Fällen wird statt der Steuerung eine Regelung eingesetzt. Das Blockschaltbild der Steuerung muss noch um die Messung aller weiteren Störgrößen erweitert werden. Darauf wird hier verzichtet.
Zusammenfassung
Bei einer Steuerung werden alle Störgrößen gemessen. Die Messergebnisse werden von einem Steuergerät erfasst. Allgemein wird der Sollwert auch als „Führungsgröße“ bezeichnet. Die Steuerung errechnet aus Führungsgröße und allen gemessenen Störgrößen die Ansteuerung des Aktors, mit der Ausgangsgröße = Führungsgröße erreicht wird. Allgemein werden gesteuerte Systeme folgendermaßen modelliert:
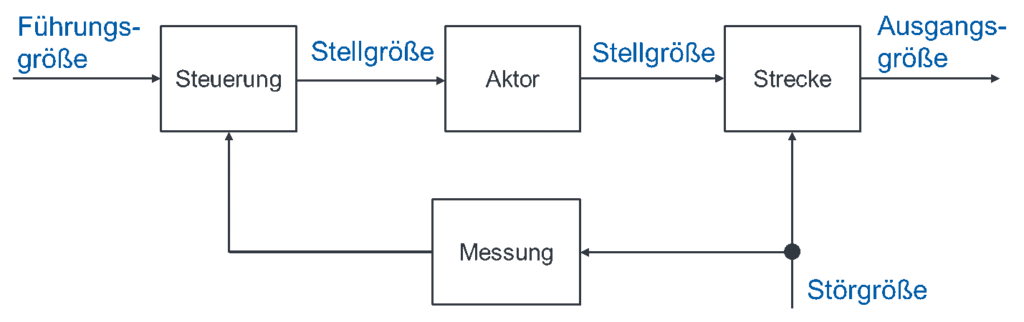
Alle gesteuerten Systeme werden auf die gleiche Weise modelliert. Es werden jeweils die gleichen Standard-Blöcke verwendet. Die Blöcke werden nur für jedes Beispiel mit anderen Begriffen gefüllt.
Weiter