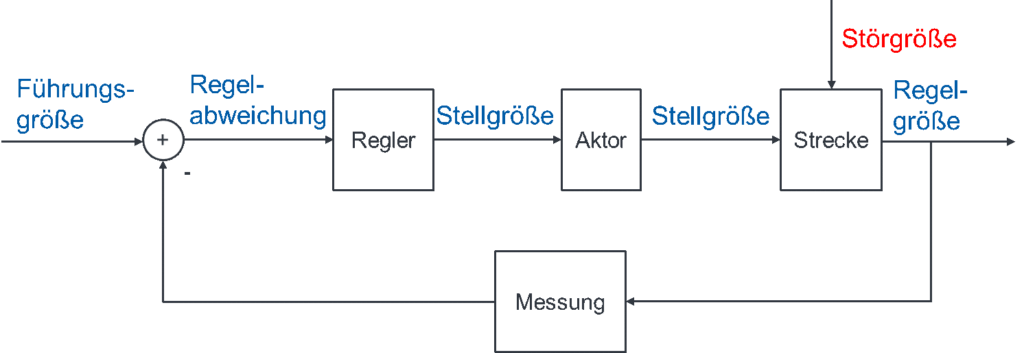
Bei der Regelung wird anstelle der Störgrößen nur die Regelgröße des Systems gemessen. Die zentrale Berechnungseinheit wird „Regler“ genannt. Sie berechnet aus der Führungsgröße und der Regelgröße die richtige Ansteuerung des Aktors. Wenn Störungen die Regelgröße beeinflussen, dann ist es ausreichend, die Regelgröße selbst zu messen. Damit werden indirekt auch alle Störgrößen erfasst. Der allgemeine Regelkreis wird folgendermaßen modelliert:
Der Nutzer gibt den Sollwert der Regelgröße als Führungsgröße vor. Die Regelgröße wird gemessen. Als „Regelabweichung“ wird die Differenz aus Führungsgröße und Regelgröße bezeichnet. Es gilt Regelabweichung = Führungsgröße – Regelgröße. Sie ist ein Maß dafür, wie gut die Regelung funktioniert, also wie gut das Ziel Regelgröße = Führungsgröße erreicht wird.
Wird das Ziel zu 100% erreicht, dann sind Regelgröße und Führungsgröße gleich groß. Dann ist die Regelabweichung = 0. Ist die Regelgröße zu hoch, dann ist die Regelabweichung negativ. Ist die Regelgröße zu klein, dann ist die Regelabweichung positiv. Bei einer zu großen Regelgröße liegt am Regler ein negativer Wert an. Der Regler steuert dann den Aktor weniger stark an. Dadurch sinkt die Regelgröße.
Je größer die Regelabweichung ist, desto stärker steuert der Regler dagegen, indem er den Aktor intensiver in die notwendige Richtung steuert. Dadurch hält sich das System selbst ohne äußeren Eingriff stabil. Was auch immer dafür sorgt, dass die Regelgröße nicht mehr der Führungsgröße entspricht führt zu einer Regelabweichung. Diese wird vom Regler erfasst und er steuert so lange den Aktor an, bis die Regelabweichung verschwindet. Abweichungen zwischen Regelgröße und Führungsgröße entstehen, wenn der Nutzer eine neue Führungsgröße vorgibt oder Störungen auf das System wirken.
Beispiel: Geschwindigkeitsregelung:
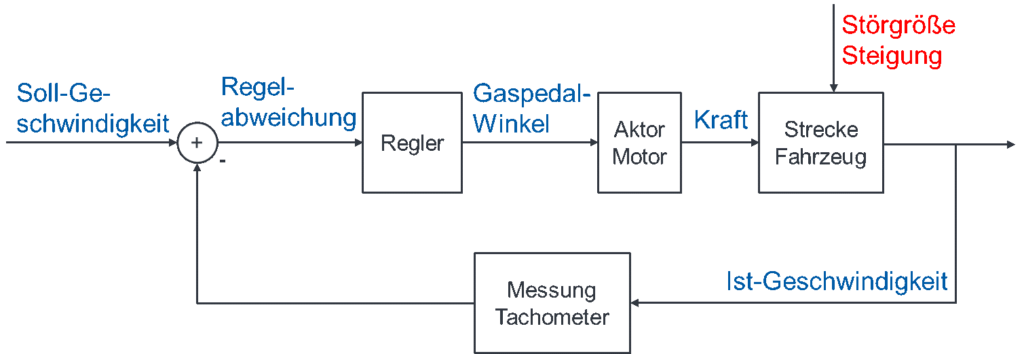
Wird nach dem Schema des allgemeinen Regelkreises die Geschwindigkeitsregelung eines Autos modelliert, ersetzen wir allgemeine Blöcke und Signale durch spezifische Begriffe. Angenommen Sie wollen 80km/h schnell fahren. Dann beträgt die Führungsgröße Soll-Geschwindigkeit 80km/h. Das Auto fährt aber nur die Ist-Geschwindigkeit von 70km/h. Sie wird vom Tachometer gemessen und vom Sollwert subtrahiert. Damit ergibt sich die Differenz aus Sollgeschwindigkeit und Ist-Geschwindigkeit als Regelabweichung. Der Regler stellt das Gaspedal so ein, dass bei zu geringer Ist-Geschwindigkeit und damit positiver Regelabweichung stärker Gas gegeben wird. Damit steigt die Ist-Geschwindigkeit am Ausgang der Strecke. Das geschieht so lange, bis die Regelabweichung verschwindet.
Jetzt fährt das Auto einen Berg herunter und die Ist-Geschwindigkeit steigt zu stark an. Damit bekommen wir eine negative Regelabweichung aufgrund einer Störung. Der Regler reduziert jetzt den Stellwinkel am Gaspedal (eine digitale Größe im Steuergerät, keine echte Winkeländerung) und das Auto reduziert die Ist-Geschwindigkeit so lange, bis die Regelabweichung verschwindet.
Angenehm an geregelten Systemen ist die Tatsache, dass Sie das System nicht mehr vollständig berechnen müssen. Sie müssen nicht wissen, welcher Gaspedalwinkel bei welcher Steigung „richtig“ ist. Es genügt, den Winkel blind so lange zu verstellen, bis die Regelabweichung verschwindet. Die Komplexität sinkt dadurch rapide. Es ist auch egal, welche Störgröße zu einer Abweichung der Ausgangsgröße führt, der Regler wird sie einfach kompensieren.
Zusammenfassung
Eine Regelung ist bei komplexen Systemen viel einfacher als eine Steuerung. Das gilt insbesondere bei Systemen mit vielen Störeinflüssen, die sich ständig ändern. Sie messen bei der Regelung die Ausgangsgröße und vergleichen Sie mit der Führungsgröße. Der Regler bewirkt autonom – also ohne äußeren Eingriff – dass die Regelabweichung verschwindet und damit das Ziel der Regelungstechnik erreicht wird: Es gilt Regelgröße = Führungsgröße.
Üblicherweise belassen Sie bei der Regelung das System unverändert. Sie ergänzen nur die Messung, das Vergleichselement (Minus) und den Regler. Wenn Sie von BMW mit der Geschwindigkeitsregelung eines Autos beauftragt werden, dann können Sie auch nicht einfach den Motor ändern, weil das Ihrer Regelung vielleicht entgegenkommt. Aktor und Strecke sind also normalerweise unveränderlich vorgegeben. Sie können innerhalb der Struktur des Regelkreises nur den Block „Regler“ verändern. Dieser besteht üblicherweise aus einem Mikrocontroller mit viel Software.
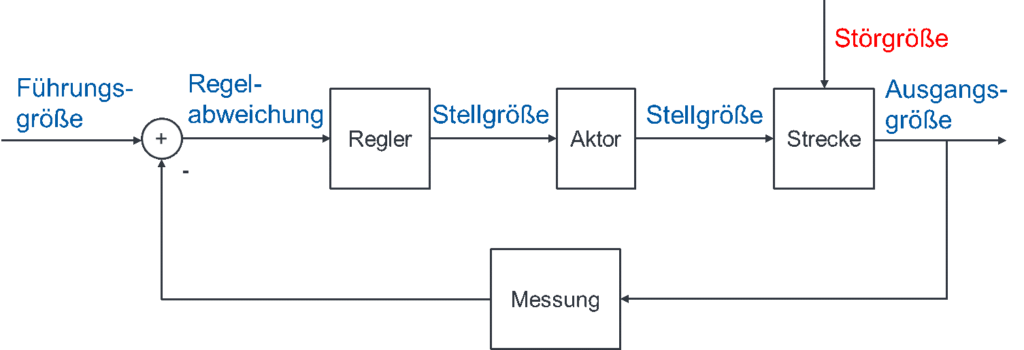
Der allgemeine Regelkreis mit allgemeinen Bezeichnungen sieht folgendermaßen aus: