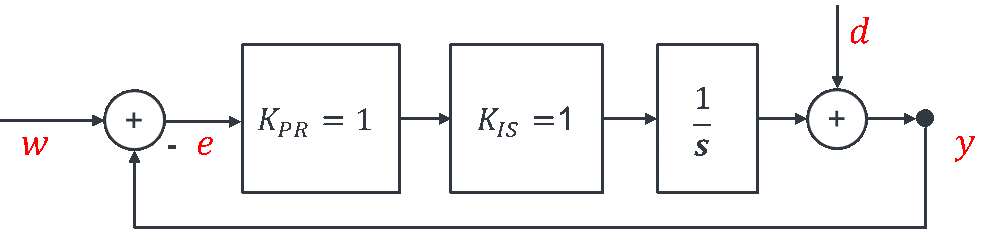
Wenn eine Störung rechts vom Integrator der Strecke wirkt, dann haben Sie Glück, denn dann wirkt der Integrator bereits störunterdrückend. Im eingeschwungenen Zustand wirkt dann die Störung gar nicht mehr auf die Regelgröße. Zur Veranschaulichung betrachten wir ein I-System mit einem P-Regler mit KPR = 1. Es wirkt eine Störung d, die direkt auf die Regelgröße wirkt.

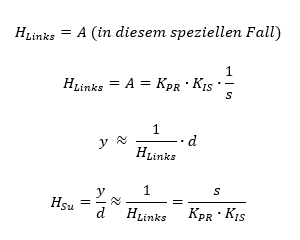
Der Integrator des Systems sorgt bereits dafür, dass die Störunterdrückung ideal ist und damit die Störung überhaupt nicht mehr auf die Regelgröße wirkt. Es ist kein weiterer Integrator im Regler notwendig, um für e = 0 zu sorgen.
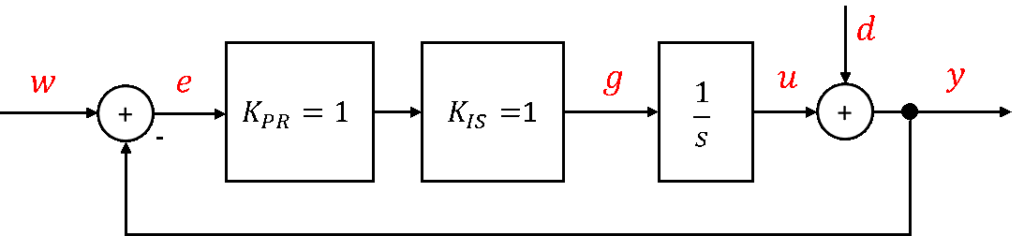
Die allgemeine Lösung, bei der die Störung nicht rechts vom Integrator liegen muss, wird in einem der vorherigen Kapitel erklärt. Betrachten wir ein Zahlenbeispiel für diesen Fall. Ich habe zwei Signale g und u eingefügt.
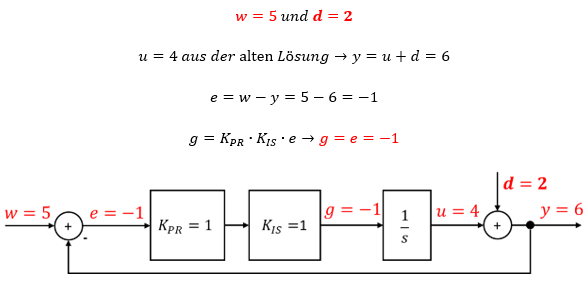
Der Ausgang eines Integrators kann fast jeden beliebigen Wert im eingeschwungenen Zustand einnehmen. Es gibt nur eine zwei Einschränkungen: Die Begrenzung des Füllstands des Speichers in der Praxis und das Vorzeichen des Ausgangs. Ist der Eingang immer positiv, kann auch der Ausgang nur positiv sein. Setzen wir Zahlen ein:
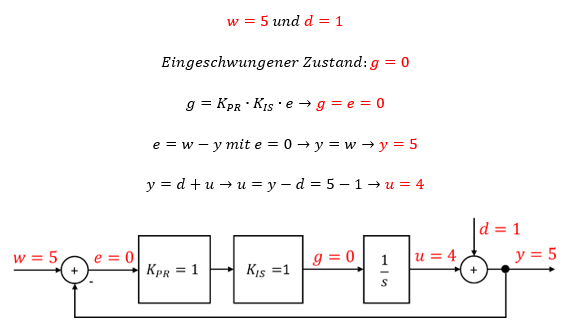
Der Regelkreis verharrt im eingeschwungenen Zustand bei unveränderten Zahlenwerten. Die Regelabweichung e ist 0 und der Ausgang y ist ungleich 0. Dies ist nur bei Einsatz von Speichern möglich.
Jetzt ändert sich die Störung d sprungförmig von 1 auf 2. Der Zustand des Systems ändert sich, er ist also nicht mehr eingeschwungen. Was passiert?
Am Eingang des Speichers liegt der Wert g = -1 an. Damit sinkt der Ausgangswert u des Speichers kontinuierlich so lange, bis das System wieder auf neue konstante Werte eingeschwungen ist. Während des Übergangs zwischen den beiden Zuständen ändert sich u durchgehend. Betrachten wir einen willkürlichen Zwischenschritt, bei dem u gerade den Wert 3,5 angenommen hat:
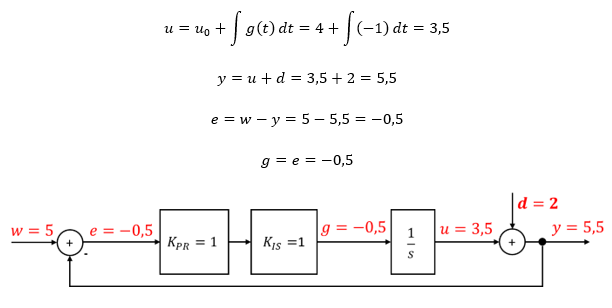
Der Speicher wird am Eingang nur noch mit g = -0,5 angesteuert. Der Ausgang des Speichers sinkt langsamer als zu Beginn. Am Ende im eingeschwungenen Zustand gilt:
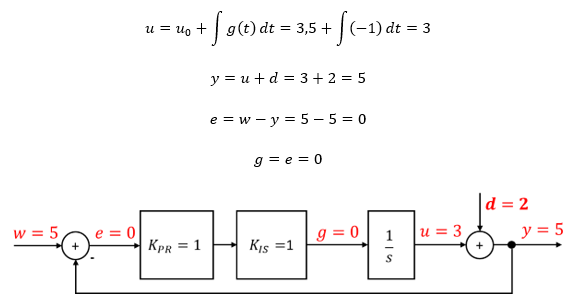
Der Speicher wird so lange am Eingang negativ angesteuert, bis sein Ausgang u den „richtigen“ Wert u = 3 erreicht hat. Die Ansteuerung g am Speichereingang wird über der Zeit immer weniger stark negativ, und damit sinkt der Ausgang u immer langsamer. Das führt zu PT-1-Verhalten.
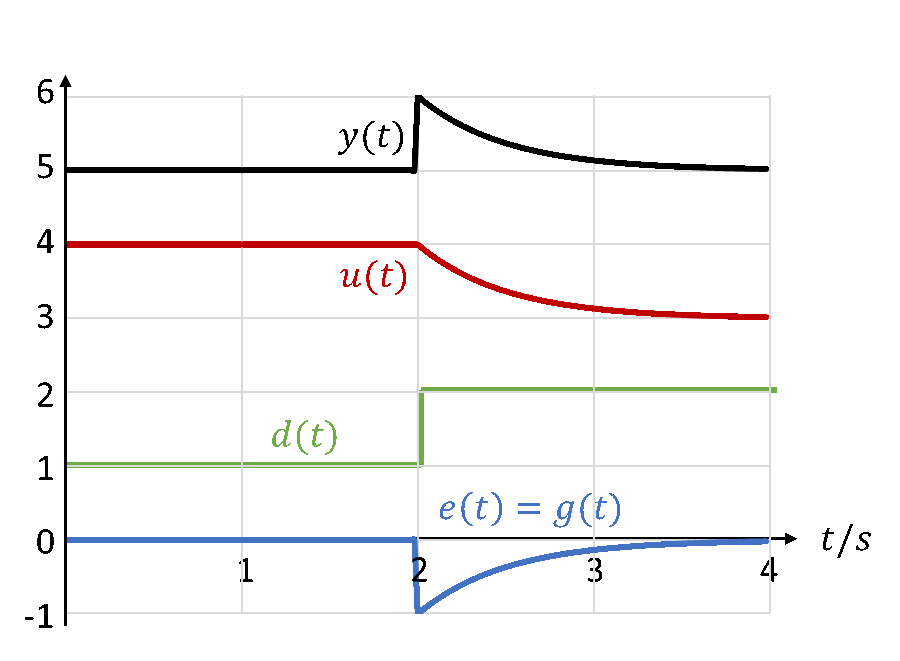
In der oberen Abbildung sind die Zeitverläufe von y(t), u(t), d(t) und e(t) zu sehen, wenn d(t) zum Zeitpunkt t = 2s einen Sprung von 1 auf 2 macht. Es folgt direkt ein Sprung in der Regelabweichung e(t), der aber abklingt. Dieses Signal liegt am Eingang des Integrators als g(t) = e(t) an. Der Ausgang des Integrators u(t) sinkt, so lange g(t) an dessen Eingang negativ ist. Die Regelgröße y ist kurzzeitig überhöht, bis u(t) von 4 auf 3 gesunken ist.
Weiter