Wichtiger Hinweis
Dieses Kapitel dient dem Verständnis von Störunterdrückung in einem allgemeinen Regelkreis. Störungen können an unterschiedlichen Stellen innerhalb des Blocks „A“ auftreten. Hier wird sehr stark vereinfacht, dass die Störung nur auf den Ausgang wirkt. Das Kapitel „Störunterdrückung“ am Ende des Tutorials löst dieses Problem allgemein. Bitte verwenden Sie deshalb in der Prüfung die Formeln aus diesem Abschnitt nicht.
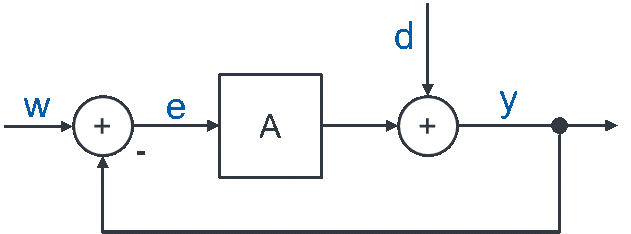
Betrachten wir eine Störung d, die additiv auf den Ausgang des Systems wirkt:
Es ändert sich eine Gleichung: Es gilt
y = A ∙ e + d
e = w – y
y = A ∙ (w – y) + d = A ∙ w – A ∙ y + d
Wir addieren wieder auf beiden Seiten der Gleichung den Term A ∙ y
y + A ∙ y = y ∙ (1 + A) = A ∙ w + d
Dann dividieren wir wieder durch (1 + A)
Es ergeben sich zwei Terme, einer ist von w abhängig und der andere von y. Um die Sache zu vereinfachen werden zwei Übertragungsfunktionen definiert. Das Führungsverhalten HFü gilt für d = 0, also für Systeme ohne Störung. Wenn wir d=0 in der Gleichung einsetzen, ergibt sich die gleich Lösung wie zuvor beim allgemeinen Regelkreis ohne Störung:
mit d = 0.
Zusätzlich wird die “Störunterdrückung” definiert. Die Störunterdrückung ist für Systeme mit Führungsgröße w = 0 definiert. Wir errechnen diese also, indem wir am Eingang 0 anlegen. Dann gilt
mit w = 0. Das Ziel y = w gilt auch, wenn eine Störung d im System vorhanden ist. Das Ziel wird für d ≠ 0 nur erreicht, wenn der zweite Term gegen 0 geht. Das gilt erneut nur für A → ∞.
In realen Systemen gilt wieder, dass eine Störung umso weniger stark auf den Ausgang wirkt, je größer A ist. Bei A = 100 gilt z. B. y = 0,01 ∙ d bei w = 0. Die Störung d wirkt also nur mit 1% ihres Wertes auf den Ausgang. Das ist in vielen Fällen schon ausreichend. Die Störunterdrückung ist als Übertragungsfunktion so definiert, dass der Eingang die Störung d ist und der Ausgang die Regelgröße y. Damit gilt
Das Ziel der Regelungstechnik y = w ist dann erreicht, wenn HSu = 0 gilt. Allgemein können wir schreiben:
y=HFü ∙ w + HSu ∙ d
mit
mit d=0
und
mit w=0
Ein geregeltes System wird durch diese beiden Übertragungsfunktionen charakterisiert. Egal welchen Wert wir in einem konkreten Regelkreis später für A einsetzen, diese Gleichungen gelten immer.
Weiter