Die allgemeine Lösung kann für jeden Regelkreis herangezogen werden. Dafür müssen Sie nur den allgemeinen Parameter A durch die Übertragungsfunktionen von Regler, Aktor und Strecke ersetzen. Da diese Blöcke in Reihe geschaltet sind, gilt:
A=HRegler ∙ HAktor ∙ HStrecke
Sie setzen den Wert oder die Formel des resultierenden A in die allgemeine Formel für Führungsverhalten und Störunterdrückung ein und berechnen damit das Verhalten der Regelgröße ihres konkreten Problems.
Beispiel: Regelung der Ausgangsdrehzahl eines Getriebes mit HGetriebe = 10. Wir betrachten keine Störgrößen (d = 0), denn Getriebe unterliegen üblicherweise keiner Störung von außen.
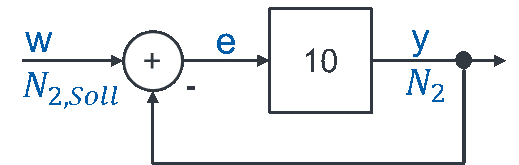
Mit HGetriebe sind bereits HAktor ∙ HStrecke zusammengefasst. Die Ausgangsdrehzahl ist also 10 Mal so hoch wie die Eingangsdrehzahl. Den Parameter HRegler haben Sie selbst in der Hand. Wir setzen den einfachsten Regler mit HRegler=1 an. Dann gilt
A=HRegler ∙ HAktor ∙ HStrecke = 10 ∙ 1 = 10
Wenn die Verstärkung von 10 nicht ausreicht, dann können Sie die Verstärkung des Reglers einfach erhöhen und Sie bekommen einen größeren Wert von A. Die Ausgangsdrehzahl verhält sich im Regelkreis also folgendermaßen:
Wie gut die Regelung arbeitet erkenne wir an der Regelabweichung e. Bei e = 0 arbeitet sie ideal. Die Abweichung der Regelgröße von der Führungsgröße erkennen wir direkt in e = w – y = w – 0,909 ∙ w = 0,091 ∙ w ≈ 0,1 ∙ w. Die Regelabweichung entspricht also 0,1 der Führungsgröße, also 10% der Führungsgröße. Wenn die Führungsgröße z. B. w=N2,soll = 100 rpm beträgt, dann ist e = 0,091 ∙ w = 9,1 rpm die Regelabweichung. Die Regelgröße ist kleiner als die Führungsgröße. Es gilt y = A ∙ e = 10 ∙ 9,1 rpm = 91 rpm.
Weiter