Weist das System P-Verhalten oder PT-1-Verhalten auf, weist das Führungsverhalten des geregelten Systems eine bleibende Regelabweichung auf. Diese ist umso geringer, je größer A ist. Wenn das System einen Speicher mit integrierendem Verhalten enthält, weist das Führungsverhalten des geregelten Systems keine bleibende Regelabweichung auf. Zur Erinnerung lesen Sie bitte nochmal die Kapitel zu den Verhaltensweisen im Regelkreis.
Betrachten wir zunächst ein System mit I-Verhalten. Im Regelkreis dieses Systems gibt es keine bleibende Regelabweichung im eingeschwungenen Zustand. Deshalb betrachten wir solche Systeme hier nicht, denn bei denen gibt es kein Problem zu lösen.
Betrachten wir anschließend ein System mit P-Verhalten oder PT-1-Verhalten. Wenn eine bleibende Regelabweichung zulässig ist, schauen wir zunächst einmal, wie hoch diese mit einem P-Regler mit kPR = 1 ist. Dieser Regler ändert A nicht. Damit können Sie also nur das System im Regelkreis ohne Reglereingriff berechnen.
Wenn die Regelabweichung bereits gering genug ist, müssen wir im Regler nichts weiter tun. Sollte die Regelabweichung zu hoch sein, müssen wir im Regler die Verstärkung kPR erhöhen.
Beispiel
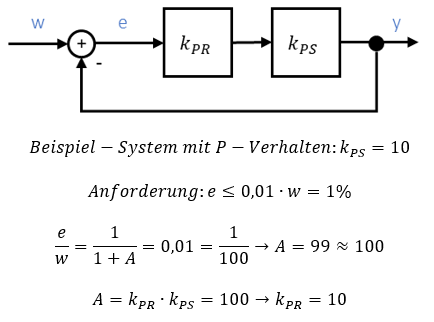
Das System bringt kPS = 10 ein. Damit liegt die Regelabweichung bei ca. 10%. Im Beispiel ist eine maximale Regelabweichung von 1% gefordert. Deshalb muss A mindestens den Wert 100 aufweisen. Also brauchen wir am Regler kPR = 10.
Wir können genauso mit einem PT-1-System rechnen. Hier betrachten wir den eingeschwungenen Zustand und die bleibende Regelabweichung. Die Vorgehensweise der Reglerdimensionierung ist mathematisch schwieriger, aber vom Prinzip her genauso wie bei einem P-System.
Was tun wir, wenn bei einem System mit P-Verhalten oder PT-1-Verhalten keine bleibende Regelabweichung zulässig ist? Wir fügen im Regler I-Verhalten hinzu. Zur Vereinfachung betrachten wir einen reinen I-Regler. Sie können auch einen komplexen Regler nehmen, der unter Anderem I-Verhalten aufweist.
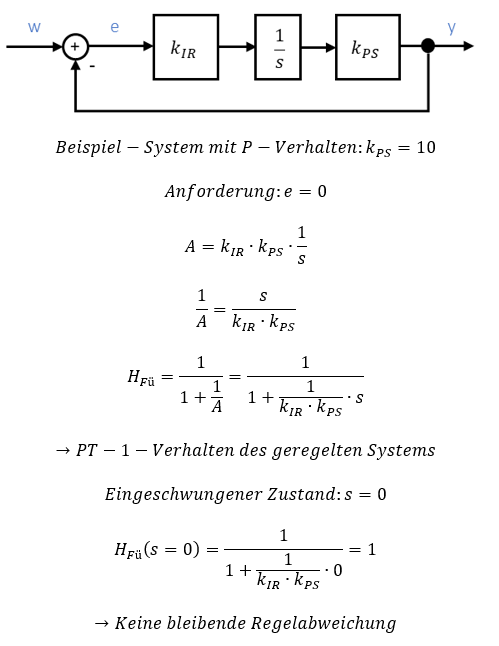
Sobald I-Verhalten in A eingebracht worden ist, gibt es keine bleibende Regelabweichung. Welchen Einfluss hat kIR des Reglers? Betrachten wir dazu den Übergangsbereich:
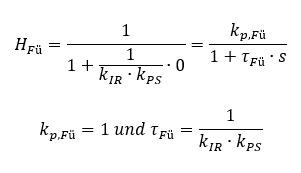
Je größer kIR ist, desto kleiner ist τFü, und desto schneller erreicht das geregelte System den eingeschwungenen Zustand.
Sie merken an dieser Stelle, dass ich Ihnen keine allgemeinen Lösungen, sondern nur noch Beispiele präsentiere. Für die Auswahl des Reglertyps und das Auslegen der Reglerparameter gibt es keine allgemeine Lösung. Das hängt immer von den Anforderungen an das geregelte System und der Verhaltensweise des Systems ab.
Weiter