Am Ende des letzten Kapitels haben wir bereits das Übergangsverhalten von PT-1-Verhalten mit einem Regelparameter verändert. Das Übergangsverhalten von PT-1-Verhalten wird durch den Parameter τ beschrieben. τFü hängt von kIR ab, wenn wir ein P-System mit einem I-Regler regeln.
Betrachten wir jetzt ein System zweiter Ordnung in einem Beispiel. Das System besteht aus I-Verhalten und PT-1-Verhalten. Das geregelte System weist aufgrund des I-Verhaltens im System keine bleibende Regelabweichung auf. Wir können das Übergangsverhalten mit einem P-Regler optimieren. Der Regelkreis sieht folgendermaßen aus:

Zunächst vereinfachen wir den Kreis für die Berechnung. Es sind drei Terme enthalten, die die Verstärkung beschreiben. Diese können wir zu einem Term zusammenfassen.
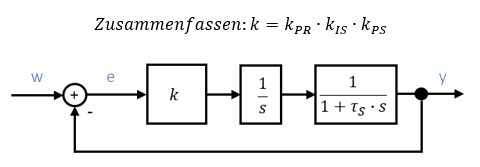
Parameter k ist keine offizielle Bezeichnung, sondern nur ein Hilfsparameter, mit dem ich das System vereinfache. Es gilt:
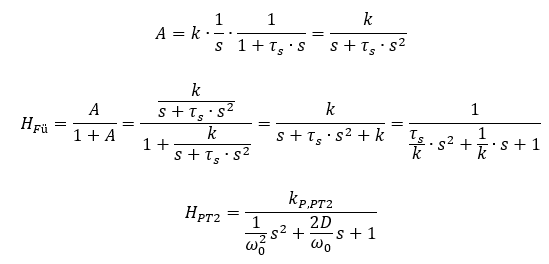
Nach dieser Umformung ist das Ergebnis der Standardform des schwingfähigen PT-2-Verhaltens ähnlich. Jetzt können wir über den Koeffizientenvergleich die charakteristischen Parameter bestimmen:
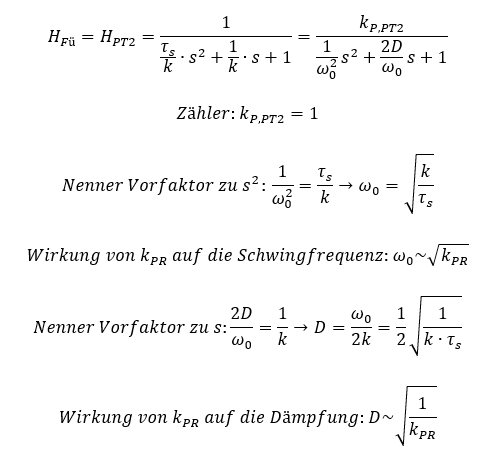
Parameter k können wir direkt über den Regler kPR beeinflussen. Parameter k wirkt auf die Schwingfrequenz und die Dämpfung des geregelten Systems. Die Parametrierung des Reglers beeinflusst also das Übergangsverhalten des geregelten Systems.
Weiter