Um ein System regeln zu können müssen wir wissen, wie es sich verhält, damit wir den richtigen Regler einsetzen können. Wie Sie einen Regler auslegen wird im Kapitel Regler erklärt. Zum Glück verhalten sich aus Sicht der Regelungstechnik viele Systeme sehr ähnlich. Sie beinhalten eine Kombination der Grundverhaltensweisen
P-Verhalten
I-Verhalten
D-Verhalten
PT-1 Verhalten
PT-2 Verhalten
Totzeit (betrachten wir nicht weiter)
Klar gibt es noch mehr Verhaltensweisen und manche Systeme lassen sich damit nicht ausreichend gut beschreiben. Dann brauchen wir einen Experten, dafür reicht ein Semester Regelungstechnik nicht aus. Ich schätze, dass Sie mit den hier vorgestellten Verfahren etwa 80% aller Systeme verstehen, modellieren und auch elementar regeln können.
Wie können wir das Verhalten eines unbekannten Systems charakterisieren? Indem wir es mit einem Sprung der Eingangsgröße anregen und die Reaktion des Ausgangs beobachten. Das nennen wir die Sprungantwort des Systems.
Die Sprungantwort zeigt zuerst den Typ bzw. die Art des Verhaltens. Jede Art des Verhaltens hat eigene charakteristische Parameter. Aus der Sprungantwort ermitteln Sie die Werte der charakteristischen Parameter. Betrachten wir als Beispiel ein System mit I-Verhalten. Es zeigt folgende Sprungantwort:
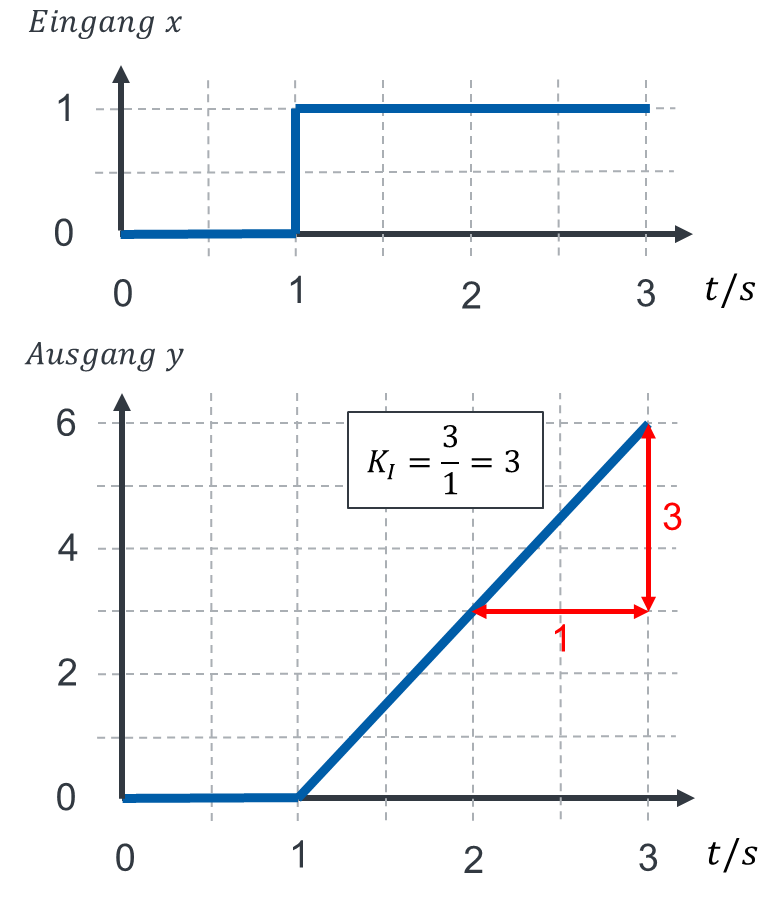
Der charakteristische Parameter von I-Verhalten ist die Steigung der Ausgangsgröße KI. Aus der Grafik ermitteln wir den Wert KI = 3.
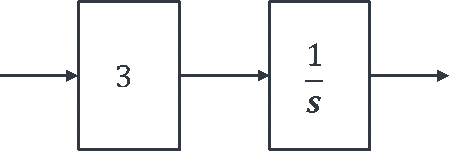
Zunächst modellieren Sie das System ohne Regelkreis als Blockschaltbild. Sie zeichnen die Blöcke ein, die zur Modellierung des Verhaltenstyps notwendig sind. Sie ergänzen sie um die charakteristischen Parameter. Wir sprechen in Aufgaben vom System. Das System mit I-Verhalten wird z. B. folgendermaßen modelliert:
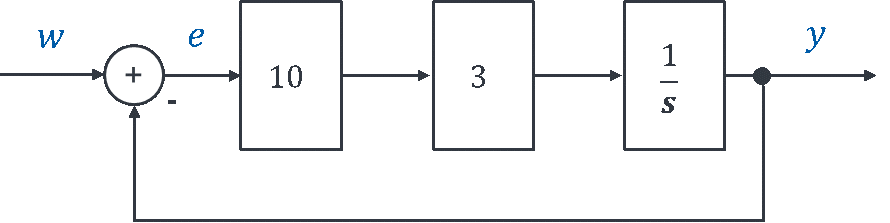
Jetzt binden Sie das Modell in einen Regelkreis ein und setzen einen Regler ein. Sie modellieren den Regler ebenfalls durch sein Verhalten. Bisher hatten wir P-Regler und I-Regler kennengelernt. Für unser Beispiel setzen wir einen P-Regler mit KP = 10 als Block für den Regler ein. Wir sprechen in Aufgaben jetzt vom geregelten System.
Wenn Störungen d im System vorhanden sind, dann zeichnen Sie diese jetzt in das Blockschaltbild ein. Auf Störungen gehen wir später noch genauer ein, das lassen wir jetzt weg.
Sie können das Verhalten des geregelten Systems jetzt ausrechnen und simulieren. Uns interessieren Führungsverhalten und später auch die Störunterdrückung. Aus der Kombination dieser beiden Übertragungsfunktionen können Sie das Verhalten des geregelten Systems berechnen. Dabei interessieren uns der eingeschwungene Zustand und das Übergangsverhalten bis zum Erreichen des eingeschwungenen Zustands.
Für die Berechnung ermitteln wir den Parameter A. A bildet alle Blöcke zwischen der Regelabweichung e und der Regelgröße y ab. Das sind üblicherweise Regler, Aktor und Strecke. Mit A können Sie alle gesuchten Größen ausrechnen. Im Beispiel gilt für A
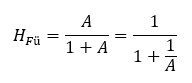
Aus A berechnen wir das Führungsverhalten und später die Störunterdrückung. Für das Führungsverhalten gilt
Wir setzen A in die Formel ein. Ich bevorzuge es, den Term 1/A einzusetzen.
Um das Verhalten dieses Führungsverhaltens zu ermitteln, müssen Sie die bisher besprochenen Verhaltensweisen kennen und die Formel so umformen, dass Sie das passende Verhalten aus der Ähnlichkeit mit den allgemeinen Formeln der Verhaltensweisen erkennen. Es gilt für die bisher betrachteten Verhaltensweisen:
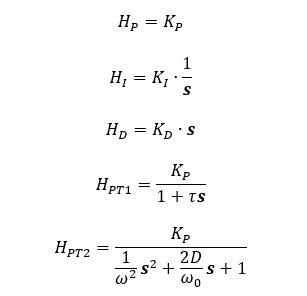
Das Führungsverhalten zeigt PT-1 Verhalten mit KP = 1 und τ = 1/30. Das sind die beiden charakteristischen Parameter.
Als nächstes betrachten wir das Führungsverhalten im eingeschwungenen Zustand. Dafür setzen wir in der Übertragungsfunktion für das Führungsverhalten s = 0. Damit gilt
Mit HFü = 1 gilt y = w und e = y – w = 0. Die bleibende Regelabweichung (e bei s = 0) ist 0, damit wird ein Ziel der Regelungstechnik ideal erreicht.
PT-1 Verhalten zeigt ein Übergangsverhalten zwischen Sprungzeitpunkt des Eingangs und dem eingeschwungenen Zustand. Es wird durch den Parameter τ definiert. Über den Regler kann τ beeinflusst werden.
Weiter