In der Praxis treffen Sie vor allem auf PID-Regler. Bei diesen Reglern können Sie die Verhaltensweisen P, I und D in unterschiedlicher Intensität einstellen. Sie können einem Regler z. B. vor allem P-Verhalten und ein wenig I-Verhalten geben. Dieser Reglertyp ist ein Standard in der Industrie. Viele Verfahren zur Reglerauslegung beziehen sich auf PID-Regler.
Der Nachteil dieser Regler ist die Komplexität in der Berechnung des Verhaltens. Wenn Sie PID-Regler einsetzen, können Sie das Verhalten des Systems oft nicht mehr von Hand mathematisch berechnen. Sie wechseln dann vollständig in die Simulation. Es ist für die Auslegung aber wichtig zu verstehen, wie die Komponenten P, I und D generell auf Systeme wirken.
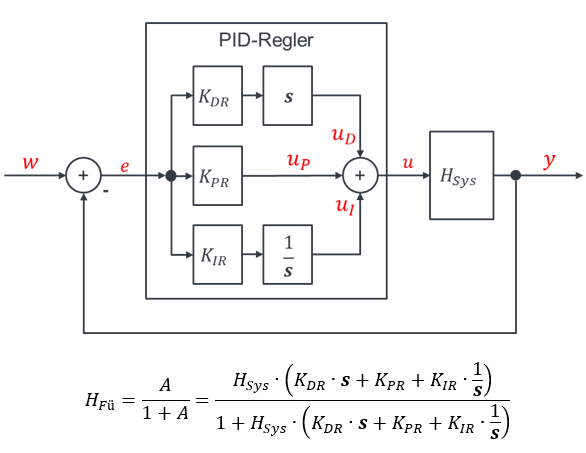
Ein PID-Regler weist folgende Struktur auf:
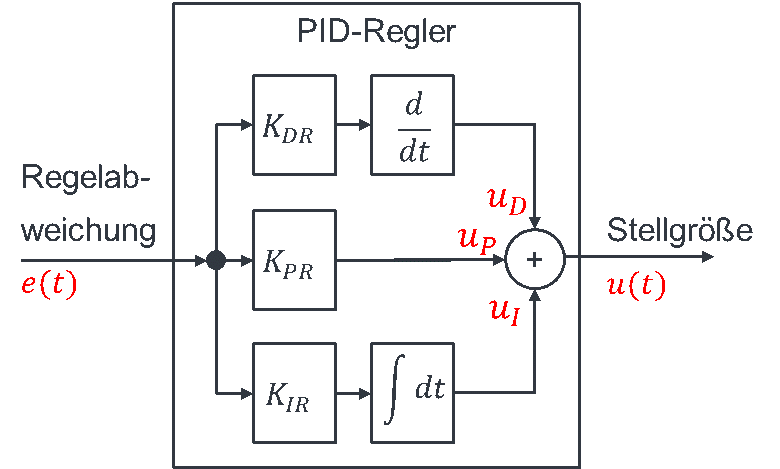
Die Regelabweichung ist immer die Eingangsgröße eines Reglers. Sie wird abgeleitet (D), integriert (I) und verstärkt (P). Jeder Anteil wird mit einem Regelparameter multipliziert. Bevor wir in die Berechnung gehen, wechseln wir wieder in den Frequenzbereich:
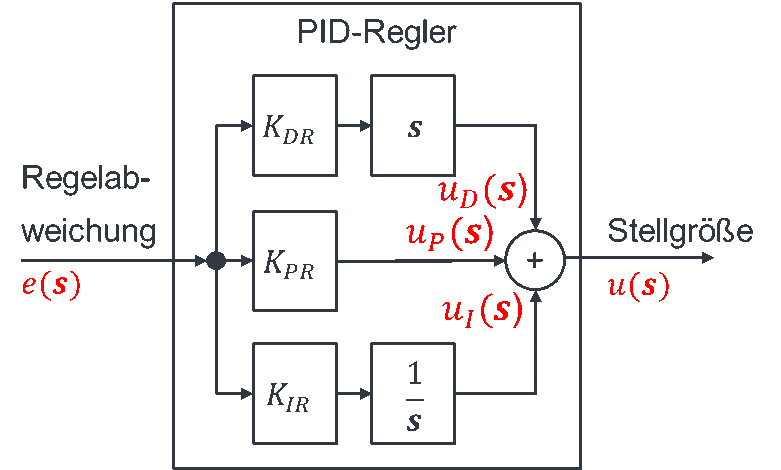

Die Intensität der einzelnen Verhaltensweisen wird über die drei Reglerparameter KD, KP und KI vorgegeben, die Sie als Entwickler in der Software des Reglers einstellen.
Einen reinen I-Regler bauen Sie z. B. dadurch auf, dass Sie KP und KD zu 0 setzen. Häufig werden PI-Regler eingesetzt, bei denen nur KD = 0 gilt.
Berechnung des Führungsverhaltens
Für die Berechnung des Führungsverhaltens eines geregelten Systems, das Sie mit einem PID-Regler regeln, setzen wir als Übertragungsfunktion des Systems allgemein HSys an. Dann gilt:
Die Übertragungsfunktion des geregelten Systems ist für händische Berechnungen zu kompliziert, gerade wenn noch eine Übertragungsfunktion des Systems dazu kommt.
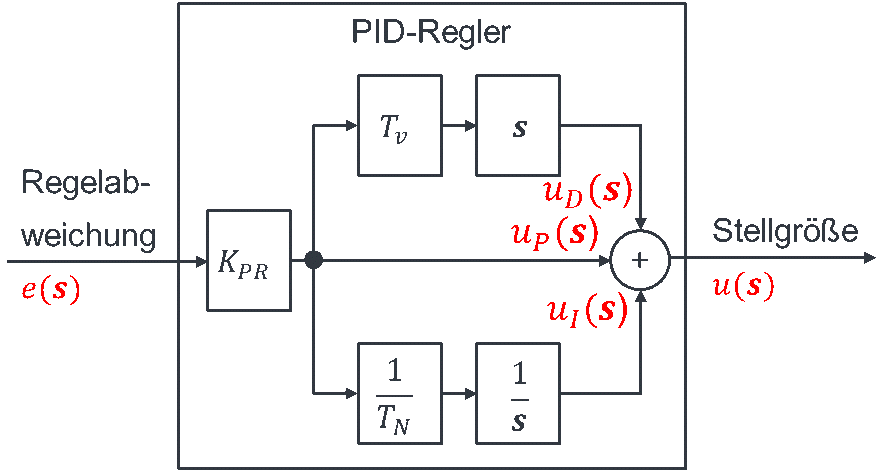
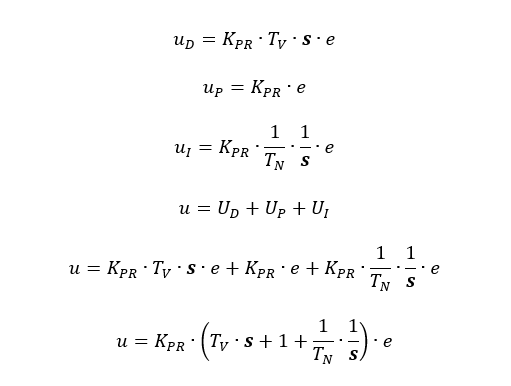
Alternative Darstellung und Berechnung
PID-Regler werden in der Praxis oft anders dargestellt und berechnet. Die Einstellmöglichkeiten bleiben die gleichen, allerdings wirkt der Parameter KPR bei der alternativen Darstellung auch auf D- und I-Verhalten des Reglers. Weil diese Darstellung weit verbreitet ist, sollten Sie sie kennen. Die Parameter Tv und TN können Sie direkt in die Reglersoftware eingeben, so wie sonst KPD und KPI. Ich bevorzuge die weiter oben dargestellte Parametrierung, weil damit die drei Verhaltensweisen unabhängig voneinander vorgegeben werden können.