Wird ein Speicher über einen Block mit proportionalem Verhalten gefüllt, dann bezeichnen wir das in der Regelungstechnik als PT-Verhalten. Ein Beispiel ist das „Befüllen“ eines Kondensators über einen Widerstand in der Elektrotechnik. Dies wird in diesem Kapitel am Wassermodell erklärt. Lesen Sie dieses Kapitel bitte, bevor Sie hier weiterlesen.
Es gibt PT-Verhalten unterschiedlicher Ordnung. Je mehr Speicher im System umgeladen werden, desto höher ist die Ordnung. Ein PT-1 System verfügt über einen Speicher, ein PT-2 System über 2 Speicher usw. Energiespeicher machen ein System träge, deshalb reagiert ein System mit vielen Speichern und damit einer hohen Ordnung i. A. langsam.
Optional: Übertragungsfunktion im Zeitbereich
Die Übertragungsfunktion eines Systems mit PT-1-Verhalten ist mathematisch kompliziert herzuleiten und zu berechnen. Es geht im folgenden Text deshalb nicht nur um PT-1-Verhalten. Es geht auch darum, wie wir mit (zu) schwieriger Mathematik umgehen. Ich zeige Ihnen Wege, mit denen Sie allgemein komplizierte Mathematik vereinfachen und Formeln verifizieren können, die sich nicht verstehen.
Dieses Unterkapitel „Übertragungsfunktion im Zeitbereich“ ist für die Regelungstechnik-Prüfung nicht klausurrelevant. Es richtet sich an interessierte Studierende, die ihre Fähigkeit zum Umgang mit komplexer Mathematik ausbauen wollen. Lehnen Sie sich zurück und genießen Sie zur Abwechslung mal einen Text, der niemals abgefragt werden wird. Am Ende des Kapitels wird es wieder prüfungsrelevant.
Die Herleitung von PT-1-Verhalten erfolgt an einem Beispiel, dessen Lösung wir bereits aus den Grundlagen der Elektrotechnik kennen. Damit ist es einfach, am Ende der Herleitung das Ergebnis zu verifizieren. Wir betrachten eine Reihenschaltung aus Widerstand (P-Verhalten) mit einem Kondensator (I-Verhalten) an einer Spannungsquelle. Die Eingangsgröße ist die Quellenspannung. Die Ausgangsgröße die Kondensatorspannung. Wie in der Regelungstechnik üblich, betrachten wir die Sprungantwort des Systems zur Charakterisierung seiner Eigenschaften. Wir setzen also einen Sprung in der Eingangsspannung von 0V auf 1V an und schauen uns die Ausgangsspannung an. Es gilt:
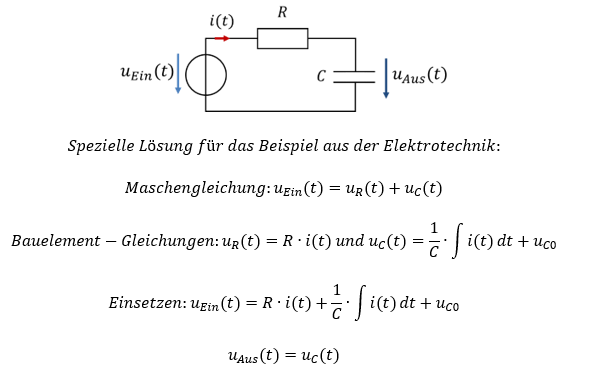
Die Gleichung liegt als Differenzialgleichung vor. Es kommt der Term i(t) und das Integral über i(t) in einer Gleichung vor. Die Mathematik, um diese Gleichung nach uAus(t) aufzulösen, haben Sie (wahrscheinlich) noch nicht gelernt. Die Lösung dieser Gleichung im Zeitbereich geben ich Ihnen deshalb einfach an und wir analysieren sie an charakteristischen Stellen.
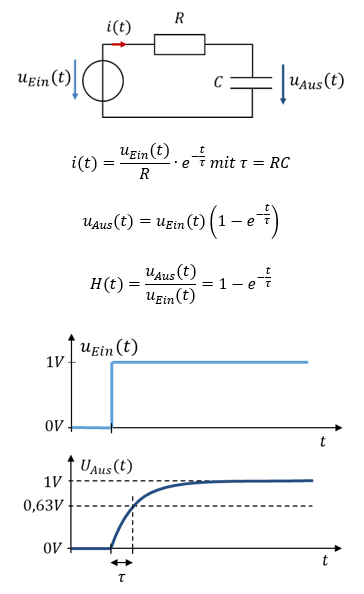
Der Zeitverlauf von Eingangs- und Ausgangsspannung ist aus den Grundlagen der Elektrotechnik bekannt. Es würde mich nicht wundern, wenn Sie damit gar nichts anfangen können. Was hilft schon eine Gleichung beim Verständnis eines Verhaltens. Wir sollten Werte in die Gleichung einsetzen um zu verstehen, wie sich das System zu bestimmten Zeitpunkten verhält. Es bieten sich der Zeitpunkt des Sprungs der Eingangsspannung (t = 0s) und der eingeschwungene Zustand bei t gegen unendlich an.
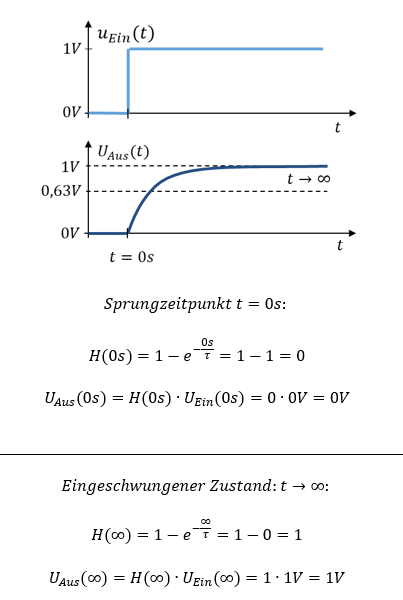
Zu beiden Zeitpunkten erhalten wir rechnerisch das Ergebnis für die Ausgangsspannung, das auch in der Grafik des Zeitverlaufs zu sehen ist. Das ist schon mal gut. Wir brauchen zusätzlich einen Zugriff auf die Formel, mit der wir ein Gespür für das Verhalten über der Zeit bekommen können. Dafür eignet sich der Parameter τ.
Der Parameter τ = RC entspricht der Zeit zwischen dem Start des Sprungs der Eingangsspannung und dem Zeitpunkt, an dem die Ausgangsspannung 63% des Endwerts erreicht. Der Parameter τ ist charakteristisch für das Verhalten des Systems. Ist τ groß, braucht die Ausgangsspannung länger um den Endwert zu erreichen. Die Kurve ist flacher. Ist τ klein, steigt die Ausgangsspannung schneller an. Der Anstieg ist immer eine Exponentialfunktion. Anhand von τ können wir direkt auf das Verhalten des Systems zwischen Sprungzeitpunkt und eingeschwungenem Zustand schließen.
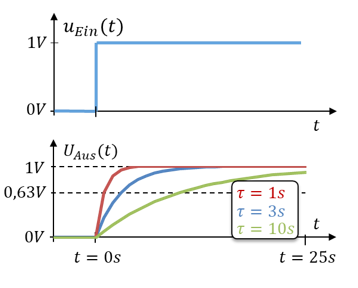
Jetzt könnten wir einen Aufbau mit Widerstand und Kondensator nehmen und nachmessen, wie lange die Ausgangsspannung nach einem Sprung in der Eingangsspannung braucht, um 63% ihres Endwerts zu erreichen. Diese Zeit entspricht τ. Wenn die Messwerte mit der Mathematik übereinstimmen, dann löst die Gleichung das beschriebene Problem. Wenn nicht, dann müssen Sie weiter nach der passenden Lösung suchen.
Einfacher geht das in der Simulation. Simulieren Sie das Problem z. B. in Multisim und überprüfen Sie das Ergebnis an bestimmten Stellen der Zeit t.
Allgemein gilt: Wenn Sie eine Aufgabe mathematisch nicht lösen können, können Sie die Lösung recherchieren. Dann müssen Sie aber zwingend prüfen, ob sie auch stimmt. Es bietet sich an, ein Beispiel zu verwenden, bei dem Sie bereits das Ergebnis kennen. Daran können Sie prüfen, ob die recherchierte Formel tatsächlich stimmt.
Dafür setzen Sie Zahlenwerte an Stellen ein, an denen das Ergebnis bekannt ist. Es bieten sich üblicherweise 0 und unendlich an. Vielleicht finden Sie noch andere passende Zahlen. Sie verifizieren, ob die Ergebnisse der recherchierten Formel mit den Erwartungen übereinstimmen. Wenn das passt, ist die Wahrscheinlichkeit hoch, dass die Formel tatsächlich ihr Problem mathematisch beschreibt.
Übertragungsfunktion im Frequenzbereich
Ab hier ist der Text wieder klausurrelevant. Die Berechnung im Zeitbereich mit Differenzialgleichung und Integralrechnung sowie Exponentialfunktionen ist kompliziert. Deshalb nutzen wir die LaPlace-Transformation um die Gleichung zu lösen. Das machen wir bei jeder Differenzialgleichung so. Es gilt:
Mit Hilfe der LaPlace-Transformation wird Integralrechnung im Zeitbereich zu linearer Algebra im Frequenzbereich. Jetzt sind wir alle mathematisch in der Lage, die Übertragungsfunktion zu berechnen – oder zumindest die Berechnung nachzuvollziehen. Die Interpretation ist aber schwieriger als im Zeitbereich, denn jetzt müssen wir statt Zeiten t Frequenzen f (bzw. die komplexe Frequenz s) in die Formel einsetzen.
Das tun wir erneut an zwei charakteristischen Stellen. Für s = 0 beträgt der Nenner 1. Damit gilt H(s) = kP. Eine Frequenz f = 0 Hz oder s = o bedeutet, dass das Eingangssignal nur eine Gleichgröße und keine Wechselgröße ist. Sobald sich das Eingangssignal also nicht (mehr) über der Zeit ändert, gilt s = 0. Das ist im eingeschwungenen Zustand für t gegen unendlich der Fall.
Für s gegen unendlich gilt H(s) = 0. Der Parameter s wird unendlich groß, wenn im Signal ein Sprung z. B. von 0 auf 1 auftritt. Eine unendlich steile Signalflanke im Eingangssignal entspricht – ohne Herleitung – mathematisch s gegen unendlich.
Allgemein gilt:
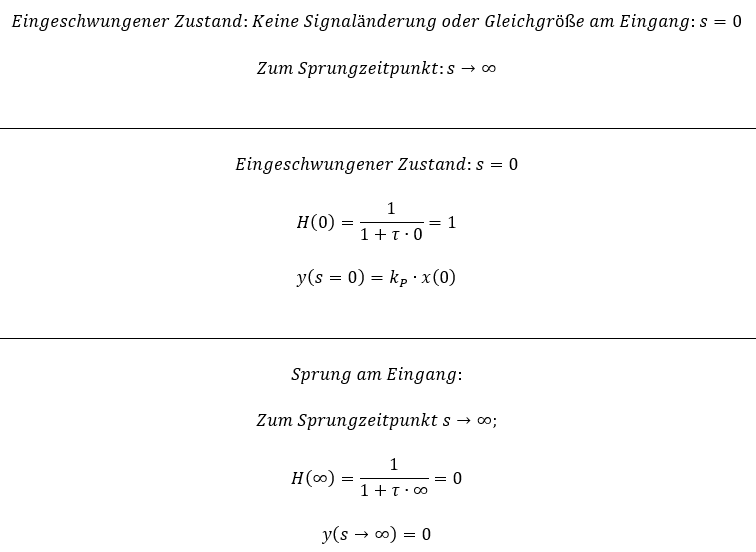
Bitte beachten Sie, dass y(0) hier nicht einen y-Wert zur Zeit t = 0s beschreibt, sondern einen y-Wert bei der Frequenz f = 0 Hz.
Allgemeines PT-1-Verhalten
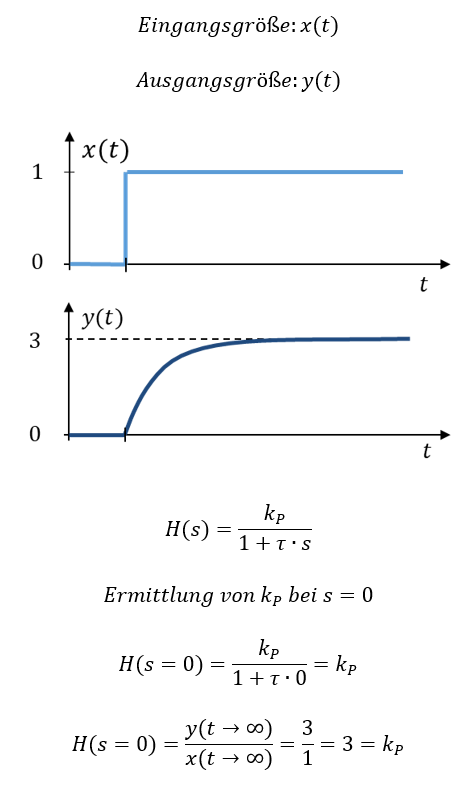
Es gibt auch PT-1-Verhalten mit einer Signalverstärkung in einem Funktionsblock. Deshalb erweitern wir die Übertragungsfunktion um einen Parameter, der diese Verstärkung ausdrückt. Wie bei P-Verhalten verwenden wir dafür eine Multiplikation mit einem konstanten Wert, den wir allgemein als kP bezeichnen.
Den Wert von kP ermitteln wir am einfachsten im eingeschwungenen Zustand bei s = 0. Dann wird der Nenner zu 1. Betrachten wir dazu ein Beispiel mit anderen Zahlenwerte als bisher. Es hilft Ihnen bei der Lösung weiterer Aufgaben.
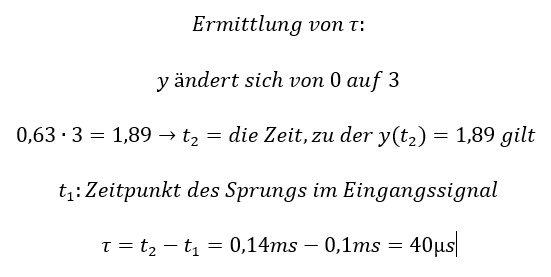
PT-1-Verhalten weist zwei charakteristische Parameter auf: kP beschreibt die Verstärkung. τ beschreibt den Zeitverlauf der Ausgangsgröße zwischen Sprungzeitpunkt und eingeschwungenem Zustand.
Rückschau auf I-Verhalten im Regelkreis
Betrachten wir jetzt den Regelkreis aus dem letzten Kapitel, bei dem A I-Verhalten zeigt.
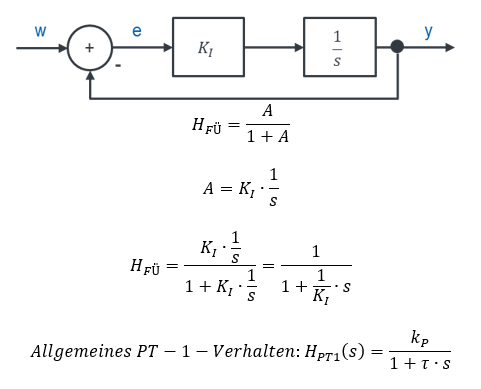
Die Übertragungsfunktion des Führungsverhaltens zeigt große Ähnlichkeit mit dem allgemeinen PT-1-Verhalten. Wir ermitteln die charakteristischen Parameter durch Koeffizientenvergleich. Dabei werden die beiden Formeln gleichgesetzt.
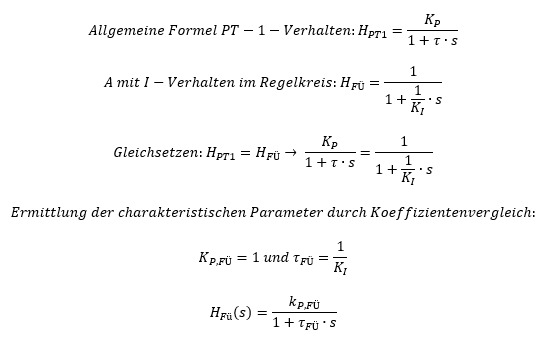
Mit dem Parameter KI können wir τFü einstellen. Je größer KI ist, desto kleiner ist τFü. Je kleiner τFü ist, desto schneller erreicht der Ausgang des Systems seinen Endwert. Betrachten wir die Sprungantwort des geregelten Systems:

Wann erreicht der Ausgangswert seinen Endwert? Theoretisch erreicht er ihn niemals vollständig. Praktisch erreicht er 99% des Endwerts nach der Zeit t = 5τ. Nach der Zeit t = 5τ nehmen wir an, dass die Ausgangsgröße auf den Endwert eingeschwungen ist.
Wikipedia
Weiter