Das Ziel jeder Regelung lautet umgangssprachlich Ausgangsgröße = Sollwert. In den Vokabeln der Regelungstechnik lautet das Ziel Regelgröße = Führungsgröße. Das Auto soll beim Tempomaten z. B. eine Sollgeschwindigkeit erreichen. Dann beträgt die Führungsgröße z. b. w = 80 km/h und die Regelgröße y soll möglichst auch 80 km/h betragen.
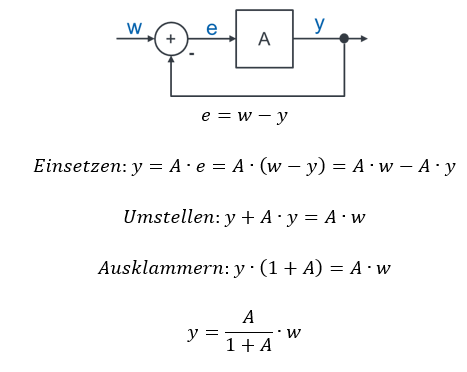
Mathematisch wollen wir erreichen, dass y = w gilt. Das „Führungsverhalten“ eines Regelkreises beschreibt, wie gut diese Anforderung erfüllt wird. Wir können mit den Regeln des Blockschaltbilds berechnen, wie sich im allgemeinen Regelkreis die Regelgröße in Abhängigkeit von der Führungsgröße verhält. Es gilt:
Das Ziel lautet y = w. Dies ist für A → ∞ erfüllt. Wenn wir im Regler also eine unendlich große Verstärkung realisieren, dann gilt y = w. Das ist in der Praxis nicht realisierbar. Anders ausgedrückt gilt, dass die Regelgröße für große Verstärkungen in der Reihenschaltung aus Regler, Aktor und Strecke ungefähr gleich der Führungsgröße ist.
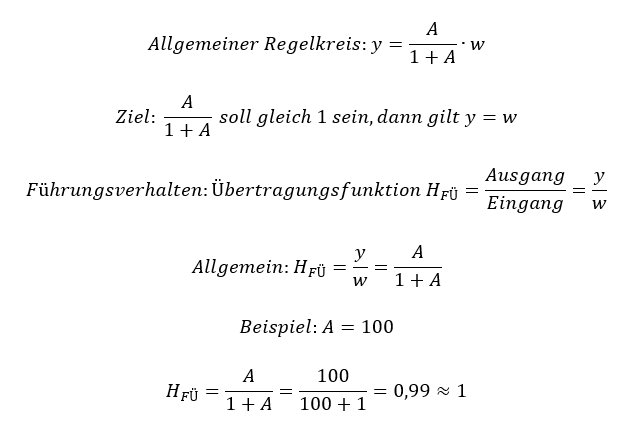
Das Führungsverhalten eines Regelkreises beschreibt, wie gut die Regelgröße der Führungsgröße folgt. Ein guter Regelkreis sorgt dafür, dass das HFÜ möglichst nah an 1 liegt. Dann entspricht die Regelgröße nahezu der Führungsgröße.
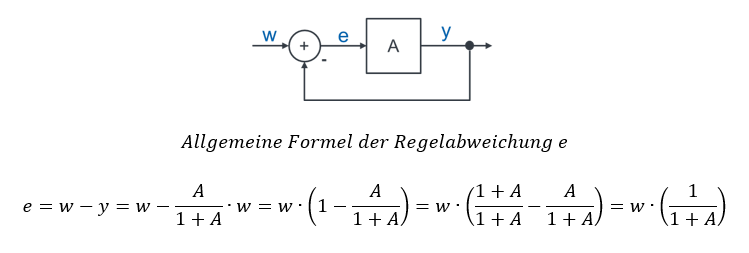
Bei A = 100 haben wir das Ziel y = w bereits ganz gut erreicht. Ob das ausreicht hängt von der Applikation ab. Ein gutes Maß für die Beurteilung der Qualität der Regelung ist auch die Regelabweichung e. Sie gibt an, wie stark die Regelgröße y von der Führungsgröße w abweicht. Die Regelung ist gut, wenn die Regelabweichung e möglichst klein ist. Sie beschreibt schließlich die Differenz aus Führungsgröße – Regelgröße. Die Regelabweichung wird aus der Gleichung am Summierer im Blockschaltbild ermittelt:
Wie hoch ist die Regelabweichung bei einem Wert von A = 100? Das hängt auch von der Führungsgröße w ab. W ist der Sollwert, den wir von außen von dem System einfordern. Den Wert legen wir also selbst fest. Für die allgemeine Betrachtung wählen wir aus Faulheit den Wert von 1, der eine schön einfache Berechnung ermöglicht: w = 1.
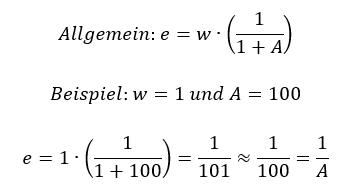
Die Regelabweichung e weist etwa den Wert von 1/A auf, wenn wir dir Führungsgröße auf w = 1 setzen.
Bei einer beliebig gewählten Führungsgröße w bilden wir den Quotienten aus e / w, um eine Aussage über die Qualität der Regelung zu ermitteln. Dann sehen wir, um wieviel Prozent die Ausgangsgröße von der Führungsgröße abweicht. Es gilt:
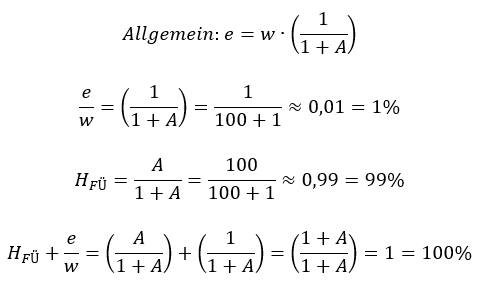
Bei A = 100 beträgt die Regelabweichung e bezogen auf die Führungsgröße w 1%. Das Führungsverhalten beträgt 99%. Die Summe dieser beiden Terme ist immer 1 (letzte Zeile). Sie brauchen also die Regelabweichung e nicht mehr nach der Formel mit A auszurechnen, wenn Sie das Führungsverhalten bereits berechnet haben. Das geht dann einfacher über die letzte Zeile der oberen Gleichungen.
Beurteilung des Verhaltens
Ist der Regler mit 99% Zielerreichung gut genug? Die Regelabweichung von 1% würde man z. B. bei einem Tempomaten gar nicht bemerken. Dann läge die Geschwindigkeit bei einem Sollwert von 80 mkm/h bei 79,2 km/h. Wenn die Körpertemperatur vom Sollwert von 37°C um 1% abweicht ist das auch nicht wild. Bei einer hochpräzisen Werkzeugmaschine kann 1% Regelabweichung schon zu schlecht sein. Es hängt also von der Anwendung ab.
Ursache der Regelabweichung
So lange wir für A nur konstante Werte einsetzen, bleibt bei allen Werten von A eine Regelabweichung bestehen. Warum ist das so?
Der Ausgang y ist nach y = A ∙ e um Faktor A größer ist als die Regelabweichung e. Wäre y = w, dann gäbe es keine Regelabweichung mit e = w – y = 0. Mit e = 0 wäre aufgrund von y = A ∙ e = A ∙ 0 = 0 auch die Regelgröße y = 0. Ohne Regelabweichung ist der Ausgang eines Reglers immer gleich 0. Das ist kein sinnvoller Betriebspunkt. Ein Regelkreis mit einer Regelgröße ungleich 0 am Ausgang muss also zwingend eine Regelabweichung e ≠ 0 aufweisen. Je größer A ist, desto kleiner ist e.
Das ist natürlich nicht befriedigend. Wir werden später eine Methode kennenlernen, wie wir dieses Problem umgehen können.
Weiter